| HUB |
The communication speed must be 1 Gbps or higher.
If devices other than WINCAPSIII (PC) are connected to the HUB, confirm that the cooperative control function is not affected by the devices by using actual robots.
In particular, do not connect a device with a lot of traffic (example: camera) if possible because the robot may stop due to an error depending on the operation condition.
|
| Ethernet communication LAN cable |
Use a shielded LAN cable of category 6 or higher.
Either a straight- or a cross-LAN cable can be used. |
| EtherCAT communication LAN cable |
Use a twisted pair LAN cable of category 5 or higher.
Either a straight- or a cross-LAN cable can be used.
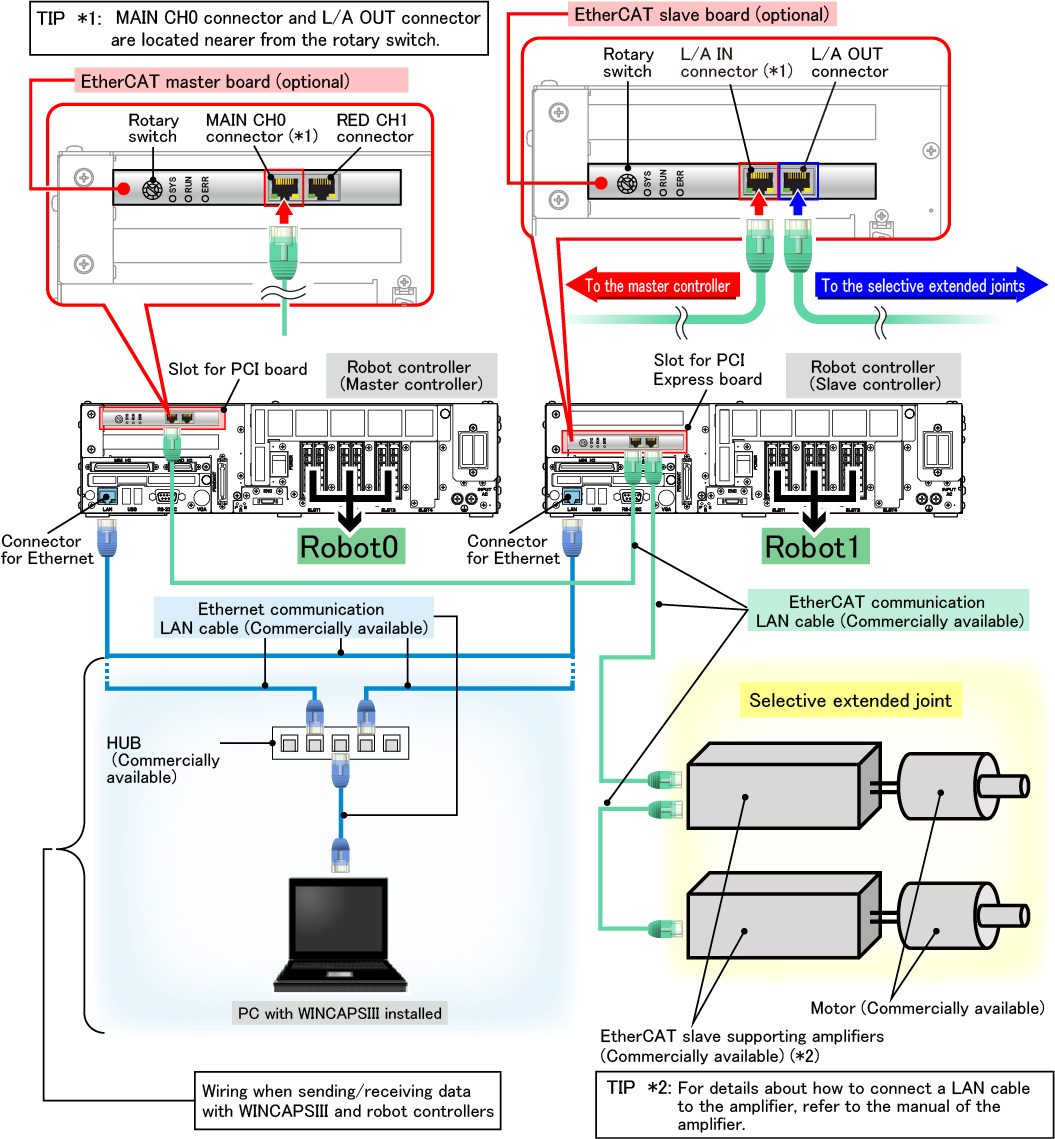
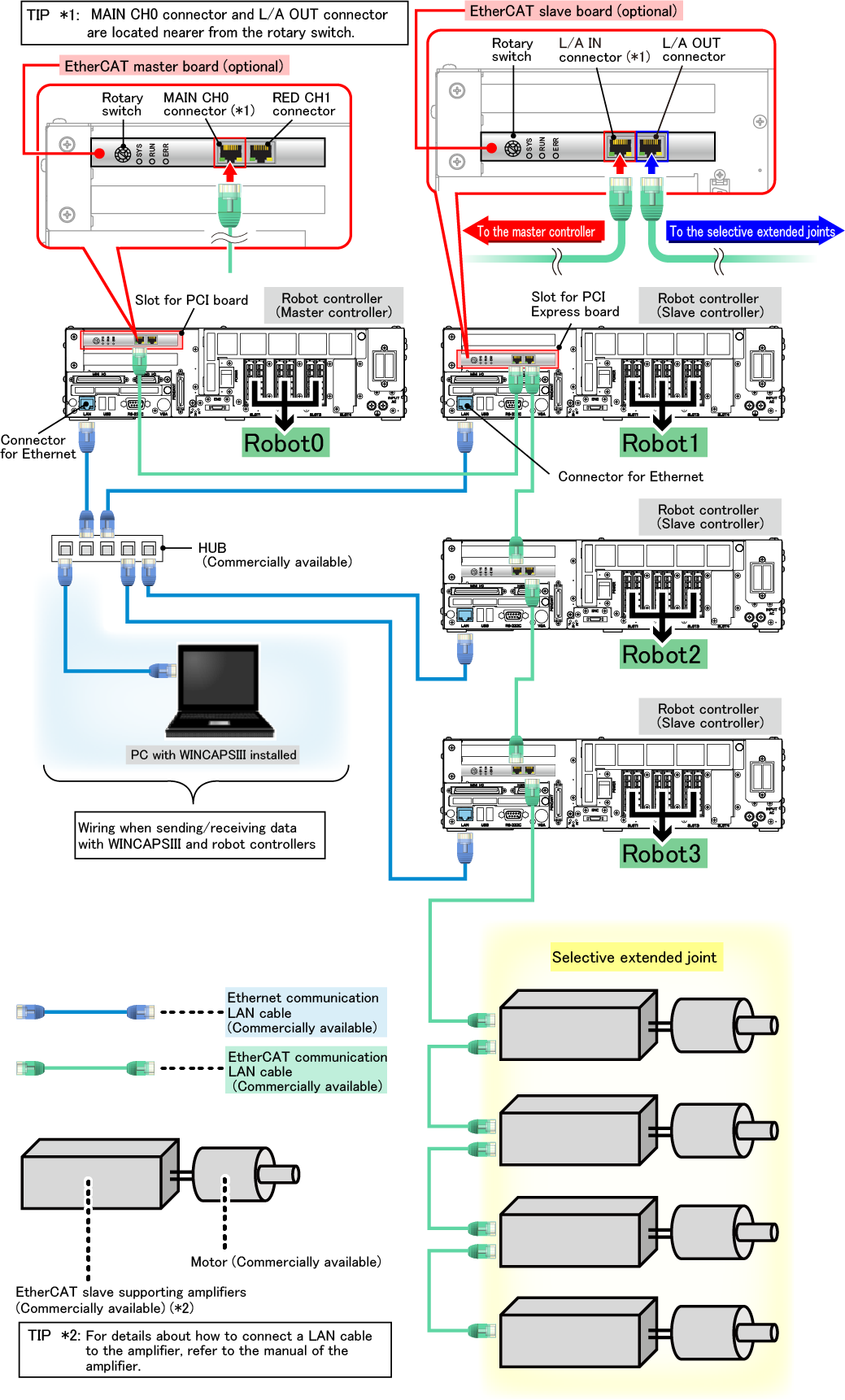
- An EtherCAT master board and an EtherCAT slave board have two LAN cable connectors. Be sure to connect cables to the connectors shown in the figure above.
- Be sure to wire a device connected to the EtherCAT master board to the EtherCAT slave board. If selective extended joints and the EtherCAT master board are connected and the EtherCAT slave board is connected from the selective extended joints, the robot does not work properly.
- For status information about EtherCAT master board and EtherCAT slave board, refer to [LED Display] of the master board and [LED Display] of the slave board.
|
| Option part |
- EtherCAT master board
-
A master controller requires an EtherCAT master board and two of software licenses; one is for the cooperative control function (for the master controller) and the other is for the selective extended joint.
However, depending on your controller's configuration, you do not need to purchase some of them. For example, to add a cooperative control function into a robot controller that already has the selective extended joint function, you only have to purchase a software license for the cooperative control function (for the master controller).
The part numbers are shown in the tables below. Select and place an order a product according to your usage.
-
- If your robot controller requires software licenses for both the cooperative control function (for the master controller) and the selective extended joint, select part number from the table below.
|
| Product |
Part number |
- EtherCAT master board (board is installed in a controller before shipment)
- Software licenses for the cooperative control function (for the master controller) and the selective extended joint are included.
|
Order both 410010-858* and 410002-862*. |
- EtherCAT master board (board only)
- Software licenses for the cooperative control function (for the master controller) and the selective extended joint are included.
|
Order both 410010-859* and 410002-863*. |
- A software license for the cooperative control function (for the master controller) only.
|
410002-775* |
- A software license for the selective extended joint. License only.
|
410002-863* |
- If your robot controller does not require a software license for the selective extended joint, select part number from the following table.
|
| Product |
Part number |
- EtherCAT master board (board is installed in a controller before shipment)
- A software license for the cooperative control function (for the master controller) is included.
|
410010-858* |
- EtherCAT master board (board only)
- A software license for the cooperative control function (for the master controller) is included.
|
410010-859* |
- A software license for the cooperative control function (for the master controller) only.
|
410002-775* |
- If your robot controller does not require a software license for the cooperative control function (for the master controller), select part number from the table below.
|
| Product |
Part number |
- EtherCAT master board (board is installed in a controller before shipment)
- A software license for the selective extended joint is included.
|
410010-848* |
- EtherCAT master board (board only)
- A software license for the selective extended joint is included.
|
410010-849* |
- A software license for the selective extended joint. License only.
|
410002-863* |
- If your robot controller requires an EtherCAT master board only, order the following part number.
|
| Product |
Part number |
- EtherCAT master board (board only)
- Software licenses are not included.
|
410010-845* |
-
- EtherCAT slave board
- Select part number from the table below.
-
| Product |
Part number |
- EtherCAT slave board (board is installed in a controller before shipment)
- A software license for the cooperative control function (for the slave controller) is available from WEB site for free of charge.
|
410010-773* |
- EtherCAT slave board (board only)
- A software license for the cooperative control function (for the slave controller) is available from WEB site for free of charge.
|
410010-774* |
- For information of how to obtain a software license for cooperative control function (for the slave controller), refer to "OPTIONAL FUNCTION AND LICENSE".
- A slave controller does not require a software license for the selective extended joint.
|
| Selective extended joint |
- Available EtherCAT Slave supporting amplifiers
-
| Manufacturer |
Product |
| SANYO DENKI CO.,LTD. |
SANMOTION R ADVANCED MODEL 100 VAC 200 VAC type
(Supported High speed communication type (Model: RS2*****H**) only. Excluding Linear amplifier) |
| YASKAWA Electric Corporation |
SGD7S EtherCAT 100 VAC 200 VAC 400 VAC type
(Model: SGD7S-****A0********)
(Excluding Linear, Direct drive) |
Delta Electronics, Inc.
(Available for Ver.2.5.* or higher) |
ASDA-A2-E series (Model: ASD-A2-****-E)
(Excluding Linear amplifier) |
Panasonic Corporation
(Available for Ver.2.5.* or higher) |
- MINAS A5B (Model: M*DH*****B**) series (Excluding M-frame)
- MINAS A6BE A6BF (Model: M*DL***BE*** or M*DL***BF***) series
- MINAS A6BL A6BM (Model: M*DL***BL*** or M*DL***BM***) series
Linear motor is available for Ver.2.9.* or higher. Direct drive is not available.
When you use a linear motor, the pitch length of encoder should be used 1μm or more (Example: 5μm) and the maximum speed should be used within 10m/s.
If it exceeds this range, please contact our sales representatives.
|
HIWIN
(Available for Ver.2.7.* or higher) |
- D1 series (EtherCAT supported models)
- D2 series (Model: D2*-****-E-**)
(Excluding D1N series. Available to Linear amplifier)
|
- Note: For asterisks (*), any letters that stand for the power capacity, encoder type, and other information are entered.
For selective extended joint, the multi-axis servo amplifier is not supported.
-
- Maximum number of selective extended joints that can be connected
- The maximum number of selective extended joints that can be connected per robot controller is predetermined.
It is four when a four-axis robot is connected or two when a six-axis robot is connected to a robot controller.
For example, when two robots are used for cooperation, if both the master controller and the slave controller are connected to a four-axis robot for each, a total of eight selective extended joints can be connected.
|
| Wiring when sending/receiving data with WINCAPSIII and robot controllers |
When the system for the cooperative control function is adjusted, data is sent/received between WINCAPSIII and a master controller, and also between WINCAPSIII and a slave controller as well. In this case, a PC with WINCAPSIII installed and the master and slave controllers must be all connected. Therefore, wire them as shown above. |
| Others |
- Since an master controller equips an EtherCAT master board, the same PCI board, such as an electric gripper control board or parallel I/O board, cannot be used together. A PCI Express board, such as a CC-Link remote device board, can be used together.
- To use an electric gripper in a robot connected to the master controller, refer to "Precautions on Using an Electric Gripper".
- Field network is not available for the slave Controller. With WINCAPSIII, set the I/O allocation of the slave controller to "Mini I/O-dedicated mode".
|