| HUB |
The communication speed must be 1 Gbps or higher.
If devices other than WINCAPSIII (PC) are connected to the HUB, confirm that the cooperative control function is not affected by the devices by using actual robots.
In particular, do not connect a device with a lot of traffic (example: camera) if possible because the robot may stop due to an error depending on the operation condition.
|
| Ethernet communication LAN cable |
Use a shielded LAN cable of category 6 or higher.
Either a straight- or a cross-LAN cable can be used. |
| EtherCAT communication LAN cable |
Use a twisted pair LAN cable of category 5 or higher.
Either a straight- or a cross-LAN cable can be used.
|
| Option part |
- EtherCAT master board
-
A master controller requires an EtherCAT master board and a software license for the cooperative control function (for the master controller).
However, depending on your controller's configuration, you do not need to purchase some of them. For example, to add a cooperative control function into a robot controller that already has the selective extended joint function, you only have to purchase a software license for the cooperative control function (for the master controller).
The part numbers are shown in the tables below. Select and place an order a product according to your usage.
-
- If your robot controller requires an EtherCAT master board, select part number from the table below.
|
| Product |
Part number |
- EtherCAT master board (board is installed in a controller before shipment)
- A software license for the cooperative control function (for the master controller) is included.
|
410010-858* |
- EtherCAT master board (board only)
- A software license for the cooperative control function (for the master controller) is included.
|
410010-859* |
- If your robot controller does not require an EtherCAT master board, order the following part number.
|
| Product |
Part number |
- A software license for the cooperative control function (for the master controller) only.
|
410002-775* |
- If your robot controller requires an EtherCAT master board only, order the following part number.
|
| Product |
Part number |
- EtherCAT master board (board only)
- Software licenses are not included.
|
410010-845* |
-
- EtherCAT slave board
- Select part number from the table below.
-
| Product |
Part number |
- EtherCAT slave board (board is installed in a controller before shipment)
- A software license for the cooperative control function (for the slave controller) is available from WEB site for free of charge.
|
410010-773* |
- EtherCAT slave board (board only)
- A software license for the cooperative control function (for the slave controller) is available from WEB site for free of charge.
|
410010-774* |
- For information of how to obtain a software license for cooperative control function (for the slave controller), refer to "OPTIONAL FUNCTION AND LICENSE".
|
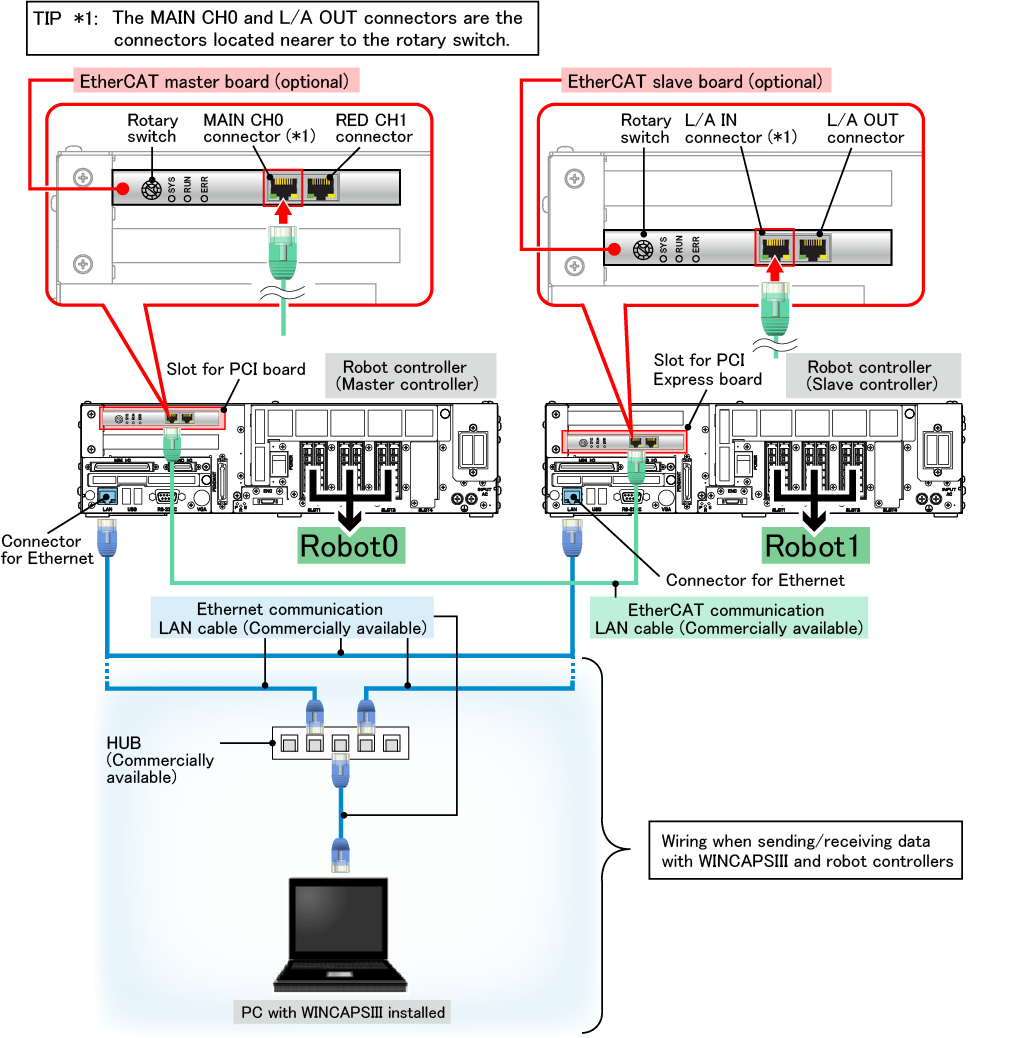
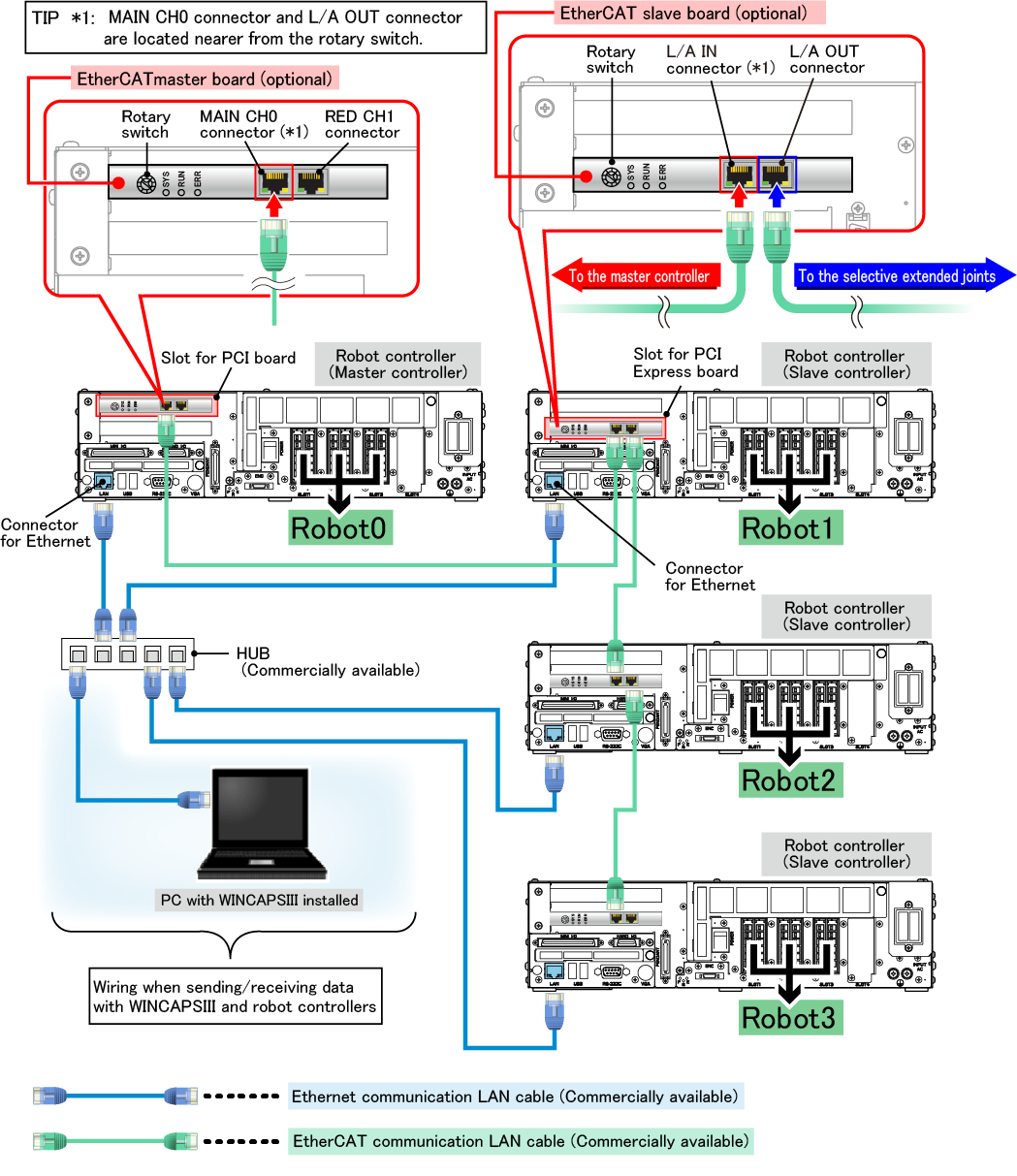
| Wiring when sending/receiving data with WINCAPSIII and robot controllers |
When the system for the cooperative control function is adjusted, data is sent/received between WINCAPSIII and a master controller, and also between WINCAPSIII and a slave controller as well. In this case, a PC with WINCAPSIII installed and the master and slave controllers must be all connected. Therefore, wire them as shown above. |
| Others |
- Since a master controller equips an EtherCAT master board, the same PCI board, such as an electric gripper control board or parallel I/O board, cannot be used together. A PCI Express board, such as a CC-Link remote device board, can be used together.
- To use an electric gripper in a robot connected to the master controller, refer to "Precautions on Using an Electric Gripper".
- Field network is not available for the slave Controller. With WINCAPSIII, set the I/O allocation of the slave controller to "Mini I/O-dedicated mode".
|