
ID : 4458
Arm Operation
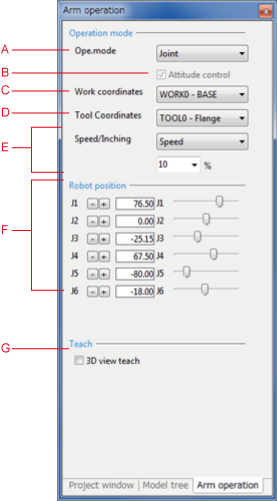
This window is for moving the simulated robot in the Arm 3D view window.
Description of the Drop-down Menu
A: Ope. Mode
Select movement mode.
- Axes: operates all axes.
- XY-bisection: moves according to the selected work coordinates. RX/RY/RZ rotate around the work coordinates centered on the tool origin point.
- Tool: moves according to the selected tool coordinates. RX/RY/RZ rotate around the work coordinates centered on the tool origin point.
B: Attitude control
This option enables/disables the Attitude control function under X-Y mode or TOOL mode operation.
C: Work Coordinates
Select work coordinates.
D: Tool Coordinates
Select tool coordinates.
E: Speed/Inching
Select normal running or inching.
- Speed: While the "Move position" button is held down, the corresponding robot joint continuously moves at the specified speed (%).
- Inching: Each time the "Move position" button is pressed, the corresponding robot joint inches by the specified amount of movement (mm or degree).
F: Move Position Buttons
Moves the robot displayed in Arm 3D view in accordance with the selected movement mode.
G: 3D View Teach
Teaches the posture symmetry to the surface when clicking an object within the Arm 3D view window.
ID : 4458