
ID : 4604
Engineering-design Notes for Robot Hands
Design a hand (end-effector) so that it will satisfy conditions (1) and (3) described below.
Strictly observe these engineering-design notes. Otherwise, the clamped sections of the robot unit will become loose, rattle or be out of position. In the worst case, the mechanical parts of the robot unit and the robot controller may be damaged.
Mass of Hand
The total mass of a hand or tool (including workpiece) should be less than the maximum allowable payload of the robot.
Be sure to include the mass of wirings and piping used for a hand or tool.
| Total mass of hand or tool ≤ Max. allowable payload (incl.work-piece). (Mass of payload that you have preset) |
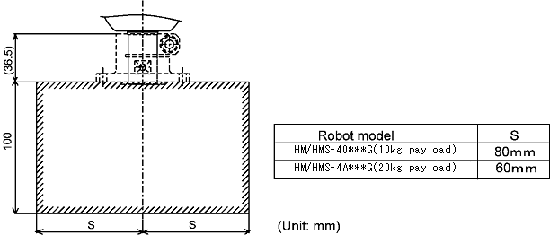
Hand Center of Gravity
For HM series, the center of gravity of a hand or tool (including work-piece) should be located within the range specified in Figure below.
 |
Moment of Inertia Around the T Axis
The moment of inertia of a hand or tool (including work-piece) around the T axis should be less than the maximum allowable moment of inertia around the T axis of the robot.
| Hand's moment of inertia around the T axis ≤ Max. allowable moment of inertia (incl. work-piece) |
Calculate the moment of inertia around the T axis according to the graph given below.
You may program the reduced ratio of the speed and acceleration individually within the range specified below. If you set the reduced ratio of the programmed speed only, the controller automatically calculates that of the acceleration according to the formula below.
Acceleration (%) = (Speed/100)2x100
When calculating the hand's or tool's moment of inertia around the T axis, refer to the moment-of-inertia formulas.
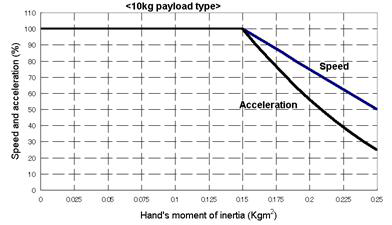
Application Sample of Hand's Moment of Inertia: HM/HMS Series, 10 kg Payload Type
- To run the robot at 100% of the programmed speed and acceleration: The moment of inertia around the T axis should be 0.15 kgm2 or less.
- If the moment of inertia around the T axis is 0.17 kgm2: Run the robot at 90% or less of the programmed speed and at 81% or less of the programmed acceleration.
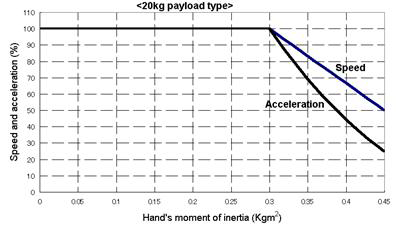
Application Sample of Hand's Moment of Inertia: HM/HMS Series, 20 kg Payload Type
- To run the robot at 100% of the programmed speed and acceleration: The moment of inertia around the T axis should be 0.3 kgm2 or less.
- If the moment of inertia around the T axis is 0.33 kgm2: Run the robot at 90% or less of the programmed speed and at 81% or less of the programmed acceleration.
ID : 4604
- Related Information
- Moment-of-inertia Formulas