
ID : 4844
Changing the 2nd-axis (R-axis) Mechanical Ends
To change the 2nd-axis mechanical ends, first change the position of the mechanical stop bolt that was mounted from the factory, and then change the motion space of the R-axis with the teach pendant or WINCAPSIII.
Follow the procedure given below.
1
Turn the power switch of the robot controller to ON.
Set the mode selector switch of the teach pendant to MANUAL.
2
Press [F2 Arm] on the basic screen.
Move the 2nd axis (R-axis) to the range from 12° to 78° using the teach pendant.

3
Press the MOTOR key to turn the motor power OFF.
When working within the robot's motion space, do not allow the robot unit to move.
4
Remove the mechanical stop bolt and reinstall it to the desired position.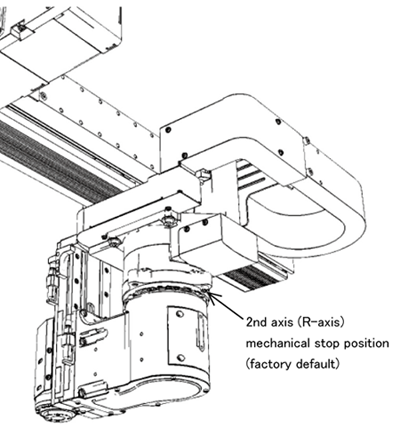
For available positions of the mechanical stop bolt, refer to "2nd-axis (R-axis) Mechanical End Change".
Tightening torque: 9.8 ±2.0 N▪m
Plated, hex. socket-head bolt M6x12 (one piece), strength class 10.9
5
Press the MOTOR key to turn the motor power ON.
Confirm that there is no person in the robot's motion space.
Change the motion space of the R-axis, refer to "Changing the R-axis Motion Range Using the Teach Pendant" or "Changing the R-axis Motion Range Using WINCAPSIII"
ID : 4844