
ID : 5217
Manual Modes
You can run the robot manually from the teach pendant or mini-pendant in any of the three modes--Joint mode, X-Y mode, and Tool mode.
Running the Robot in Joint, X-Y, or Tool Mode
| 6-axis robot | 4-axis robot | |
|---|---|---|
| Joint mode |  |
 |
| Drives each of the six joints independently. | Drives each of the four joints independently. | |
| X-Y mode |  |
 |
| Drives the robot flange linearly in base coordinates. | Drives the robot flange linearly in base coordinates. | |
| Tool mode |  |
 |
| Drives the robot flange linearly along the X-, Y-, and Z-axes of the flange face. | Drives the robot flange linearly along the Cartesian coordinates of the 4th axis. |
Note 1: This figure shows the tool coordinate system when Tool0 is selected. This coordinate system is called mechanical interface coordinate system.
In 5-axis robots, the flange can keep a constant posture (3-dimensional flange direction) only when it is accurately in parallel with the X-Y plane of the robot (RX and RY are 0 degree).
The maximum speed of the robot is limited to 250 mm/s or below at the flange (mechanical interface) or the TCP point in the Manual mode.
However, you need to keep in mind that any movable parts away from the TCP point (such as parts near the tool, customer-prepared external wirings) may exceed the limit speed.
(TCP: The origin of Tool coordinate system.)
Switching to Manual Mode
At the start, set the reduced ratio of the programmed speed to 20% or less. If you run the robot manually at high speeds from the beginning, you may mistakenly strike the robot against the surrounding objects.
- From the teach pendant
1
Set the mode selector switch to the MAN position.

2
Press the M-MOD key.

The Select Operation Mode window appears as shown in the next step.
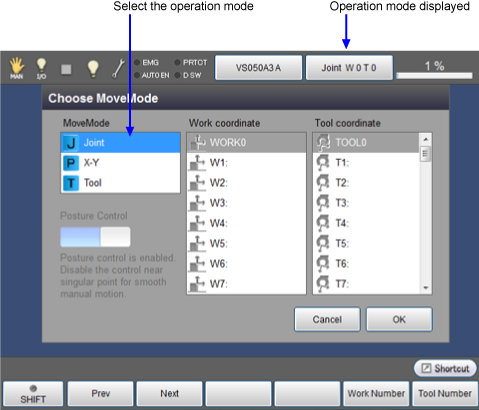
3
Select the desired operation mode by using the cursor keys or touching the screen directly, then press the OK key.
In the mode area of the status bar appears the selected operation mode.
ID : 5217