
ID : 7531
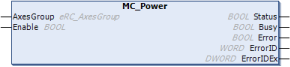
MC_Power
To make FB with the FB category "Motion" executable and turn on the robot motor.
| Graphic expression | FB category |
|---|---|
 |
Unique |
Input and Output Variable
| Variable name | Data type | Valid range | Default | Omission (*) |
|---|---|---|---|---|
| AxesGroup | eRC_AxesGroup | No | ||
|
||||
Input Variable
| Variable name | Data type | Valid range | Default | Omission (*) |
|---|---|---|---|---|
| Enable | Boolean |
|
FALSE | No |
|
||||
(*) : For some Variable, entries can be omitted.
- Yes : Entry can be omitted.
- No : Entry required always.
Output Variable
| Variable name | Data type / Description |
|---|---|
| Status | Boolean |
|
|
| Busy | Boolean |
|
|
| Error | Boolean |
|
|
| ErrorID | Word |
|
|
| ErrorIDEx | DWord |
|
Function Description
FB with the FB category "Motion" needs to be made executable by this FB before execution.
While FB with the FB category "Motion" is being executed, the input variable "Enable" in this FB needs to be set to TRUE.
Attention
When an error occurs in the robot controller, FB with the FB category "Motion" may be made non-executable (The output Variable "Status" in this FB becomes FALSE).
Then, if the FB with the FB category "Motion" needs to be executed, use the following procedure to make the FB with the FB category "Motion" executable beforehand.
- Reset the error.
- Set the input variable "Enable" in this FB to FALSE.
- Set the input variable "Enable" in this FB to TRUE.
ID : 7531