
ID : 7874
I/O Setting
The following shows how to configure I/Os to communicate with a robot controller.
The following shows how to set I/Os.
1
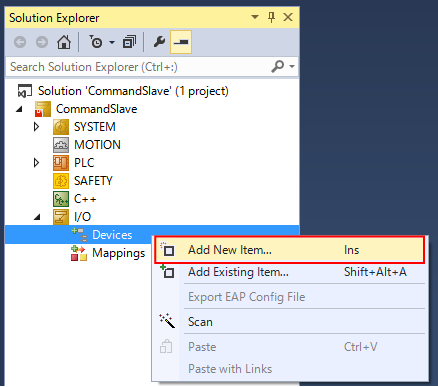
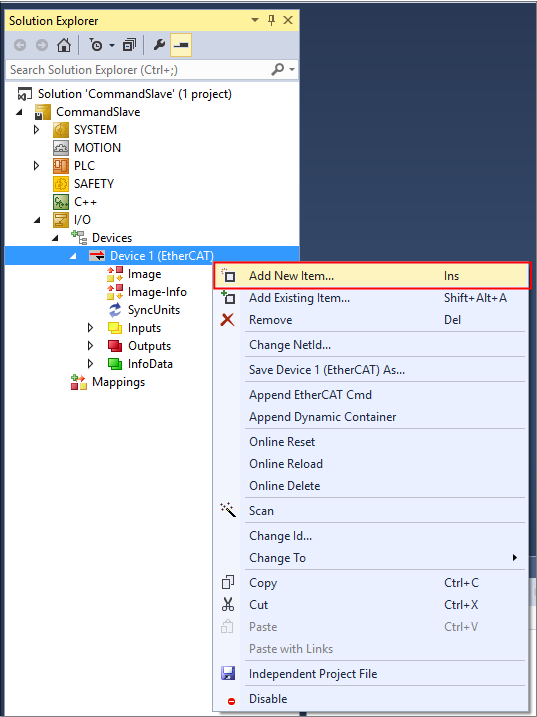
In the [Solution Explorer] tab, right-click [Devices].
Click [Add New Item...].
2
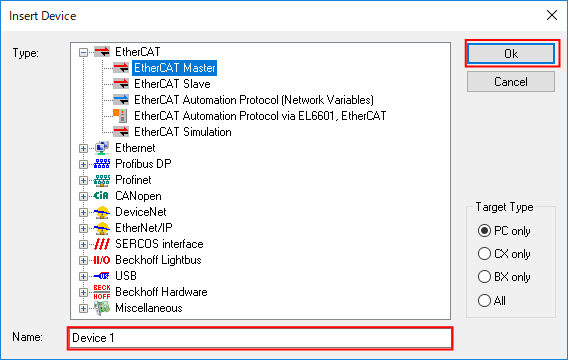
Select the type of field network you use.
In this example, "EtherCAT Master" is selected.
Enter any name and click [OK].
3
Click [Cancel].
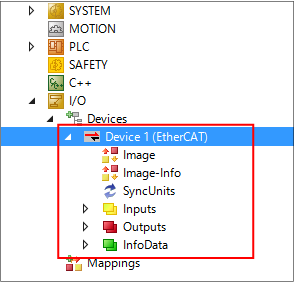
Items of the selected field network are added into the lower layer of [Devices].
4
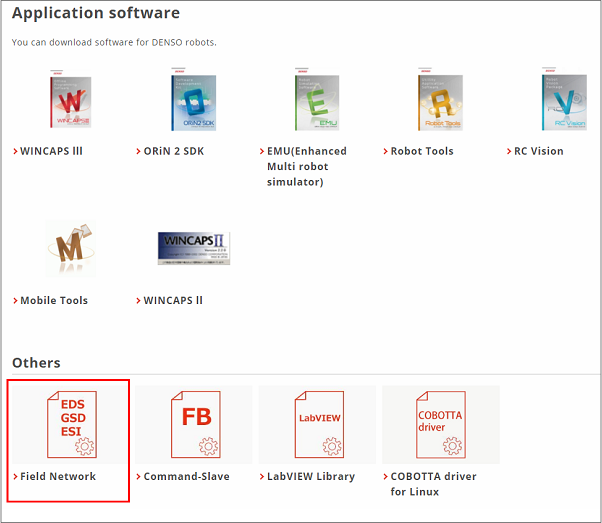
From the following URL, access DENSO WAVE Industrial Robot website and download the configuration file of field network.
https://www.denso-wave.com/en/robot/download/application/
From the [Application software] webpage, click [Field Network].
5
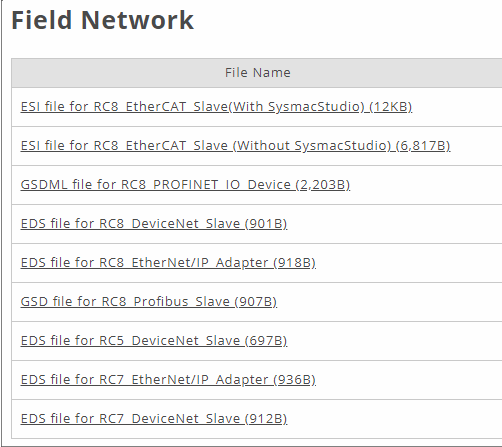
Download a configuration file suitable for the field network you use.
In this example, download [ESI file for RC8 EtherCAT Slave (Without SysmacStudio)].
6
Unzip the downloaded field network configuration file, and install it in application.
In this example, saving the downloaded file into the following folder will complete the installation.
C:\TwinCAT\3.1\Config\Io\EtherCAT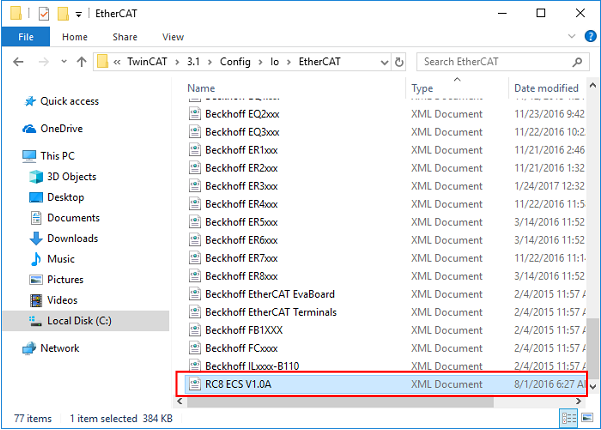
7
Right-click an item of field network that has been added in STEP3.
Click [Add New Item...].
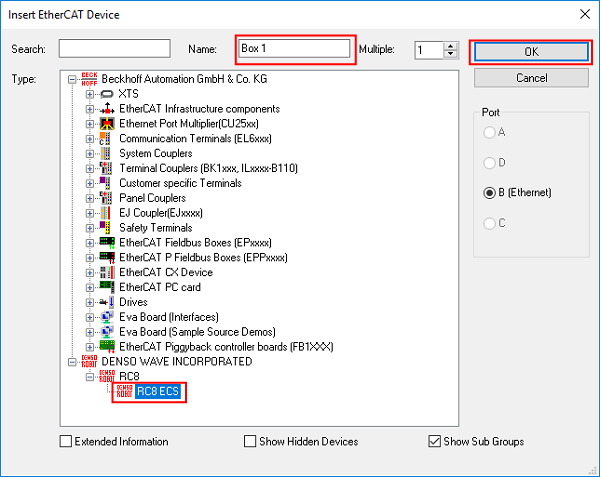
8
Select [DENSO WAVE INCORPORSTED] - [RC8] - [RC8 ECS].
Enter any name and click [OK].
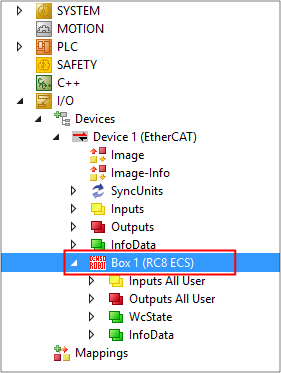
9
An ECS file is added.
Double-click the added item.
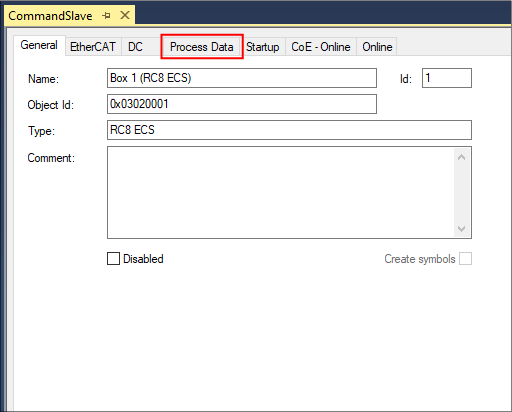
10
Property is displayed.
Select [Process Data] tab.
11
In the [Sync Manager] area, select [Outputs]. In the [PDO Assignment] area, select [0x1603].
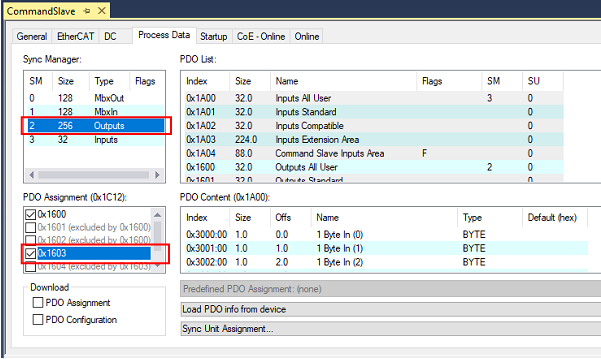
12
In the [Sync Manager] area, select [Inputs]. In the [PDO Assignment] area, select [0x1A03].
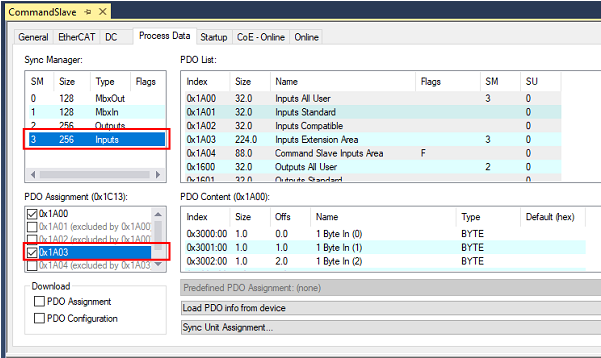
This completes the I/O setting.
ID : 7874