
ID : 5465
Using a WACOH-TECH Force Sensor
This page describes the necessary equipment for the Compliance Function with Force Sensor under the use of WACOH-TECH force sensor.
Available Force Sensor
Among DynPick WEF-6A series (manufactured by WACOH-TECH Inc.), the following models are available for the Compliance function with Force sensor.
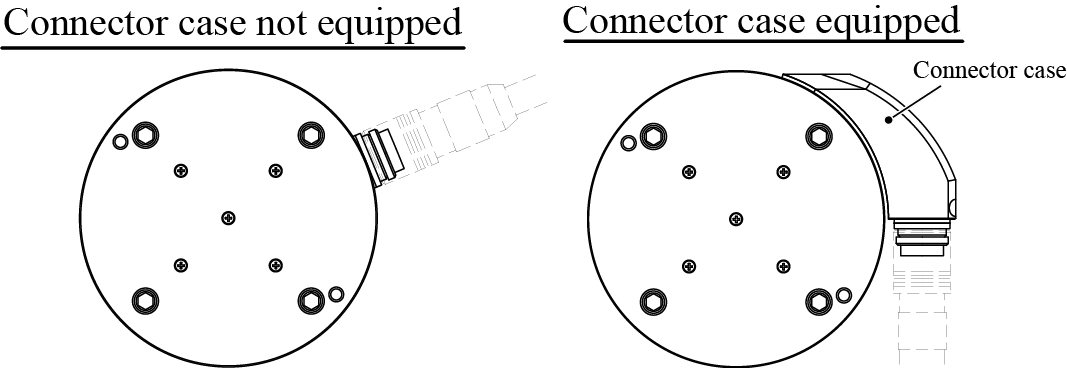
| Model /External view | Connector case (*1) | Rated load | Outline drawig | |
|---|---|---|---|---|
| Translational force [N] | Moment [Nm] | |||
|
WEF-6A200-4-RCD
|
Not equipped | ±200 | ±4 | refer to (PDF:157KB) |
|
WEF-6A200-4-RCD-B
|
Equipped | refer to (PDF:158KB) | ||
|
WEF-6A500-10-RCD-B
|
±500 | ±10 | ||
|
WEF-6A1000-30-RCD-B
|
±1000 | ±30 | refer to (PDF:157KB) | |
WEF-6A200-20-RCD-B
|
±200 | ±20 | refer to (PDF:162KB) | |
Common Specification
|
||||


*1: A connector case allows the connection direction of the sensor connector to turn into the sensor's circuit direction.
*2: For detailed information about the force sensor Dyn-Pick, refer to the user's manual of "Capacitive 6-axis force sensor WEF-6A series" manufactured by WACOH-TECH Inc.
For information about the user's manual of force sensor, please contact to WACOH-TECH Inc. .
Periodically check the force sensor.
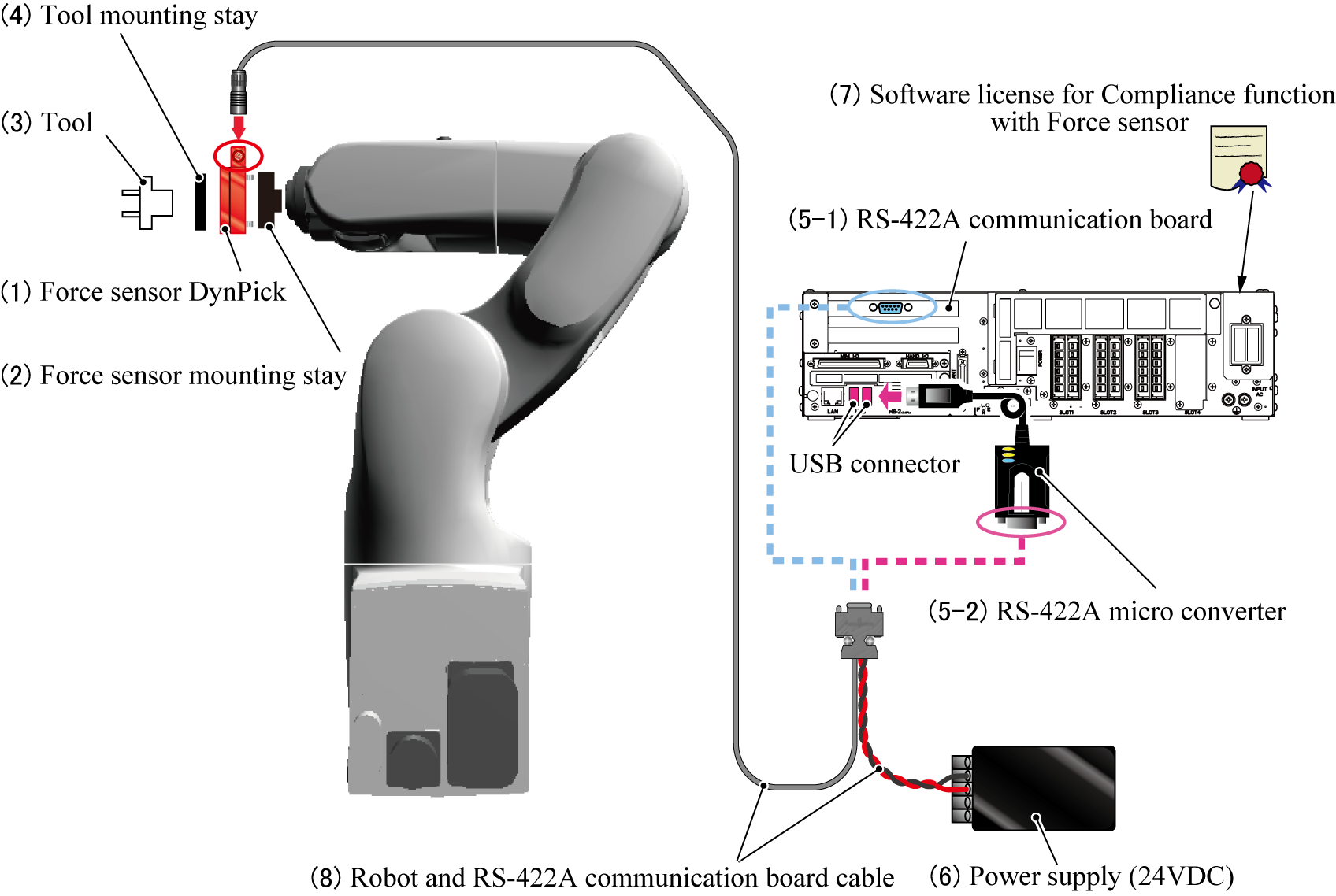
System Configuration
The following image shows the system configuration.
Only when the robot is VS-series having a communication interface flange-A, you can use the internal wiring of the robot as a wiring between a robot controller and a force sensor.
For details, please refer to "Cable Connection Using an Internal Wiring".
|
Components / Manufacturer /Model(Part number) |
Description | ||||
|---|---|---|---|---|---|
(1) Force sensorWACOH-TECH Inc.
|
This is a capacitive force sensor, Dyn-Pick. Select a force sensor according to your application. |
||||
(2) Force sensor mounting stay(made by customer) |
A stay for fixing a force sensor to the end of the robot arm. For details, refer to "How to Install a Force Sensor". |
||||
(3) Tool(selected by customer) |
Select a tool according to your application. | ||||
(4) Tool mounting stay(made by customer) |
A stay for fixing a tool to the force sensor. Create a stay with referring to the outline drawing of Available force sensor . |
||||
|
The following two devices are available for the Force sensor and robot controller connection.
|
|||||
(6) Power supply (24VDC)(selected by customer) |
A power supply to supply electricity to the force sensor. Connect two lines (red and black lines) of a force sensor and RS-422A communication board cable.
For detailed information, please refer to the user's manual of DynPick Capacitive 6-axis force sensor WEF-6A series. For about user's manual of force sensor, please contact to WACOH-TECH Inc. Be careful not to connect a red line (+24V) and a black line (0V) incorrectly as this may result in damage to the force sensor. |
||||
(7) Software license for Compliance function with Force sensorDENSO WAVE Inc.
|
This is a DENSO product. A license to enable the Compliance function with Force sensor. There are two options: "Compliance function-activated" and "License only". "Compliance function-activated" targets a newly purchased robot set. Ordering this option with a robot set will activate the Compliance function with force sensor before shipment. Please order this option with a robot set. "License only" targets a robot set that has been shipped without "Compliance function-activated" option. To use this function with such robot set, please order "License only". If you order "License only", you need to activate the Compliance function with force sensor on your robot controller. For about how to activate the function, please refer to "Activation of the Compliance Function with Force Sensor". |
||||
(8) Force sensor and RS-422A communication board cableWACOH-TECH Inc.
|
A cable to connect an RS-422A communication device (RS422-A communication board or RS-422A micro converter) and 24VDC regulated power supply to a force sensor. |
||||
ID : 5465