
ID : 878
Changing the Mechanical Ends
The mechanical ends can be changed by mounting four types of mechanical stop parts (i.e., mechanical stops, fixture blocks A, fixture block B, and plates) and then changing the set software motion limits and the RANG values. The procedures for doing this are described in the following sections.
Mounting Mechanical Stop Parts
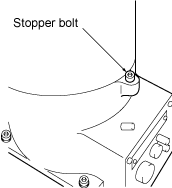
1
Move the 1st axis of the robot until the stopper bolt comes into the inside of the motion space that you want to set.
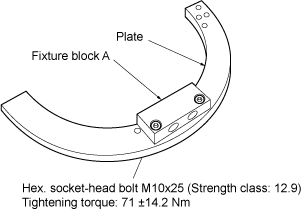
2
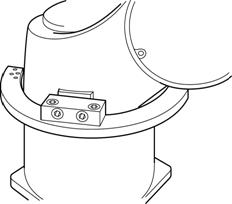
Secure fixture block A to the plate with two hexagonal socket-head bolts. (Make a pair of assemblies.)
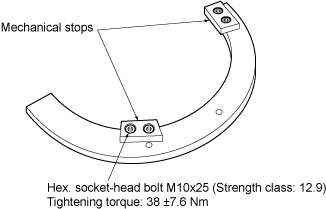
3
Turn the assemblies made in Step 2 upside down. Secure two mechanical stops to each of those assemblies with two hexagonal socket-head bolts each for determining the desired motion space.
4
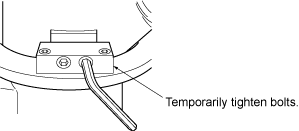
Temporarily secure one of the assemblies made in Step 3 to the side of the 1st axis with hexagonal socket-head bolts.
5
In the same way as in Step 4, temporarily secure the other one of the assemblies to the opposite side.
6
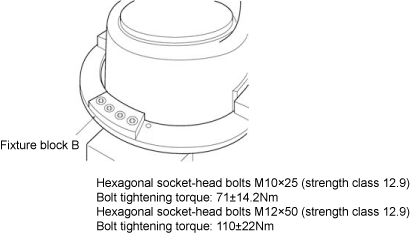
Link the assemblies together that you have temporarily secured in Steps 4 and 5, using fixture block B and four hexagonal socket-head bolts.
After that, firmly tighten the hexagonal socket-head bolts (on fixture blocks A) that have been temporarily tightened in Steps 4 and 5.
ID : 878