
ID : 2435
Notes for Setting the Positioning Speed
- To horizontally traverse the robot arm at high speeds, teach the robot so that Z axis comes to be as close as possible to its upper end.
-
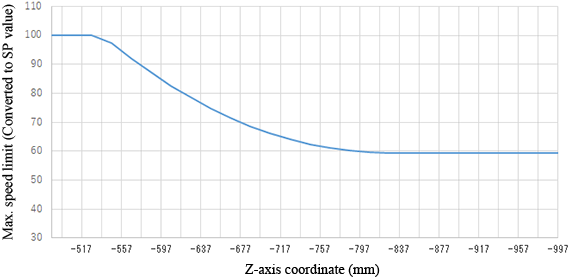
To stabilize positioning of Z axis near its lower end, the following maximum speed limiting control is automatically provided for J1 and J2 axes depending on the Z-axis coordinate value, only when the robot is moved under PTP control.
The positioning time of J1 and J2 axes becomes longer according to the maximum speed limit shown below.
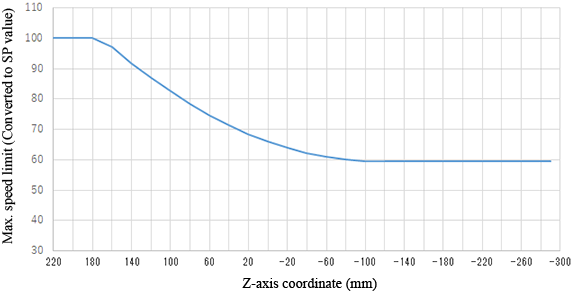
For example, in case of the HSR series robot(floor-mount type), when the robot arm moves by SP100 from the start point (Z-axis coordinate 220 mm) to the target point (Z-axis coordinated -100 mm), the maximum speed limits are as follows:
100% when Z-axis coordinate is 220 mm, 60% when Z-axis coordinate is -100 mm.
At this time, the maximum speed is the smaller value (at the lowest end) of 60%.
Maximum Speed Limit on the J1 and J2 (PTP control)
|
|
|
|
ID : 2435