
ID : 5665
Visual Calibration Procedure by Numerical Input
Calibration with entering values of three-positions
This section describes the way of calibration with entering values of three-positions.
1
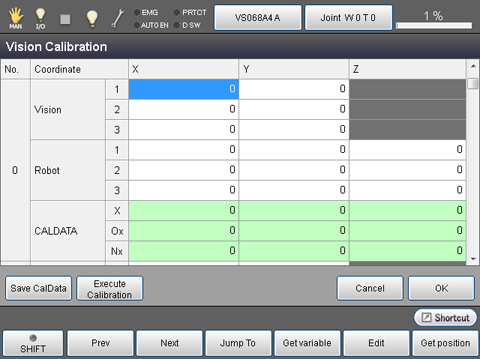
Operation path: Basic screen - [F8 Vision] - [F1 Vision Calibration]
Vision Calibration window appears.
2
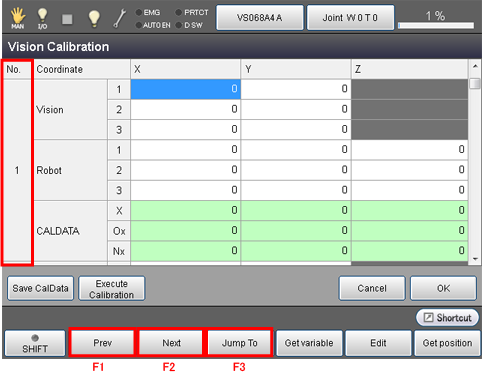
Display the Cal data table (0 - 31) that you intend to calibrate. Here you can check existing values as well.
To display the Cal data table, following three ways are available.
-
Entering number
Press [F3 Jump To] to open the number selection dialog box. Select a Cal data table number that you intend to open, and then press [OK]. Cal data table selected by the number is displayed. -
Page back/Page foward
Display a desired Cal data table by pressing [F1 Prev] or [F2 Next].
Pressing [F2 Next] once will display the next number's Cal data table. -
Cursor key operation
Display a desired Cal data table by pressing arrow keys or by turning the jog dial.
Pressing a down arrow key once will move the display by one line forward.
3
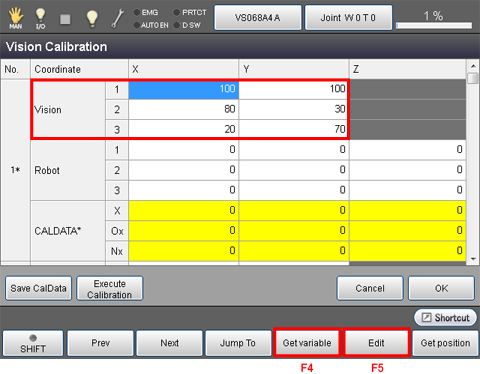
Enter vision coordinates of three positions by numerical value.
To enter the Cal data table, following two ways are available.
-
Entering values
Select a cell that you intend to input value, and then press [F5 Edit] to display a numerical value input dialog box. Enter a value and then press [OK] to input the value to the cell selected. -
Entering V type variable number
Select a cell that you intend to enter a value, and the press [F4 Get variable] to display a V type variable selection dialog box. Once the dialog box appears, enter a desired V type variable number, and then press OK. The values of X- and Y-coordinate of the selected V type variable will be copied to each cell on the Vision Calibration window.
4
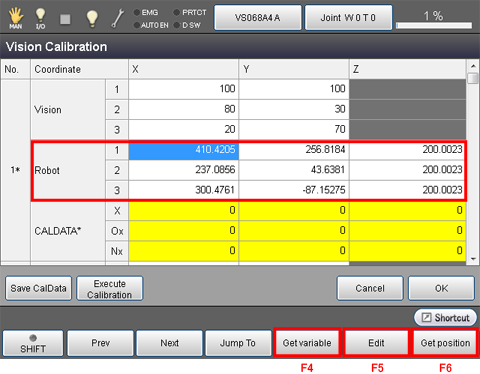
Enter robot coordinates for three positions (X, Y and Z) which correspond with robot coordinates.
To enter the Robot coordinates, following three ways are available.
-
Entering values
Select a cell that you intend to input value, and then press [F5 Edit] to display numerical value input dialog box. Enter a value and then press [OK] to input the value to the cell selected. -
Entering P type variable number
Select a cell that you intend to enter a value, and the press [F4 Get variable] to display a P type variable selection dialog box. Once the dialog box appears, enter a desired P type variable number, and then press OK. The values of X-, Y- and Z-coordinate of the selected P type variable will be copied to each cell on the Vision Calibration window. -
Acquiring current position
Select a cell that you intend to enter a value, and then press [F6 Get position] to display a confirmation dialog box. Press [OK] on the dialog box. The value of X-, Y- and Z-coordinate of the current robot position will be copied to each cell on the Vision Calibration window.
5
Press [Execute Calibration].
Conversion matrix is calculated and the results will be stored in the CALDATA area.
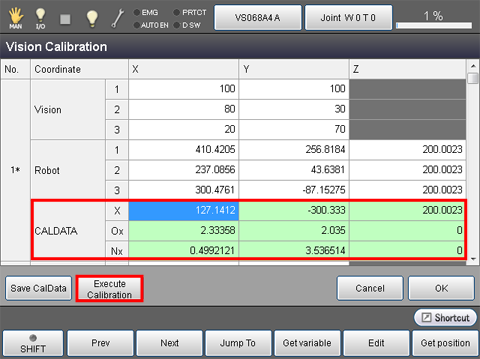
- All three positions on both the visual coordinates and the robot coordinates need to be input. If not, an error is issued and the conversion matrix will not be calculated.
- Values of [CALDATA] area can be edited by pressing [F5 Edit].
6
To retain the data after the controller power turns off, press [Safe CalData]. Data will be saved in the data storage memory.
7
Close the Vision Calibration window by either:
- Pressing [OK] button. The data will be saved into the working memory.
or
- Pressing [Cancel] button. The data will be discarded.
Calibration with direct input of the conversion matrix
If the conversion matrix is calculated from other method than STEP5, you may directly input CALDATA values in cells of the CALDATA area.
After performing STEP1 and STEP2, select a cell that you intend to edit, and then click [F5 Edit] to display a dialog box. Enter a value with the dialog box and then click [OK].
ID : 5665