
ID : 5666
The External TCP Function
Overview
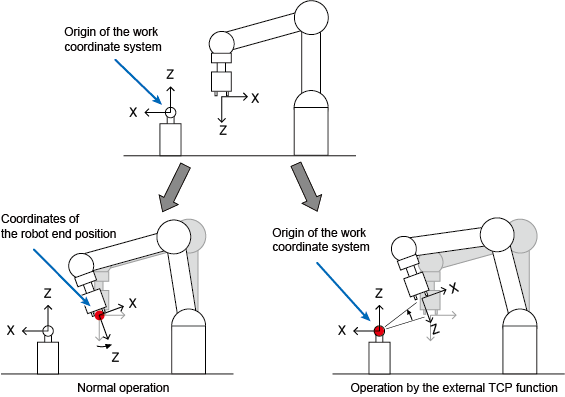
In the normal robot operation, you need to specify the position to which the robot end will be moved, whereas the external TCP function allows you to specify the position to which the origin of a work coordinate system will be moved.
In actual use of the function, the origin of a work coordinate system should be fixed, and the robot end moves relative to the fixed origin of the work coordinate system.
For example, in the normal operation, a robot changes its posture with the robot end kept at the same position by moving the arm around the origin of the robot end coordinates (the origin of the tool coordinate system). Unlike the normal operation, the external TCP function allows the robot arm to move around the origin of the work coordinate system.
This function is available in Ver.1.7.* or higher.
The function enables a robot to perform the CP motion (except for arc motion) with fewer teaching points in the following cases.
- A robot holding a workpiece deburrs the workpiece with a fixed die grinder.
- A robot holding a workpiece seals the workpiece with a fixed caulking gun.
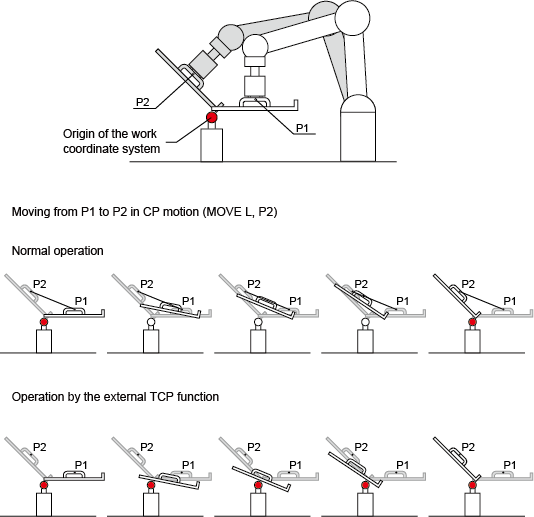
In the figure below, the robot holding a workpiece is supposed to move it with its surface kept at the origin of the work coordinate system. In the normal operation, setting only two teaching points, P1 and P2, is insufficient for the robot to keep the surface of the workpiece at the origin of the work coordinate system. The external TCP function enables the robot to move the workpiece with the surface kept at the origin of the work coordinate system only with P1 and P2.
Usage
Activate the external TCP function
To use the external TCP function, you need to enter a license key in the [Option manager] window.
For how to enter the key, refer to "Registering License".
For how to obtain the key, refer to "OPTIONAL FUNCTION AND LICENSE".
Change the attribute of a work coordinate system
In the setting window for work coordinate systems, select a work coordinate system and then change its attribute from "Standard” to “FixedTool(Fix)".
For how to change the attribute, refer to "Displaying and Setting Work Coordinates" in the TEACH PENDANT OPERATION GUIDE.
Switch work coordinate systems
In the [Choose MoveMode] window on the smart TP, switch to a work coordinate system with the attribute "FixedTool(Fix)". Operating the robot with the work coordinate system selected will start the external TCP function.
For how to switch work coordinate systems, refer to "Displaying and Changing Mode Selection Screen" in the TEACH PENDANT OPERATION GUIDE.
Specify a work coordinate system and its attribute in a program
You can switch work coordinate systems and change its attribute temporarily in a program.
These settings adjusted through a program are revoked when the controller is turned off.
How to change the attribute temporarily in a program
Use the Work command.
How to switch work coordinate systems temporarily in a program
Use the ChangeWork command.
Precautions for Use
- The external TCP function requires a license.
- Attributes cannot be added to WORK0 (the base coordinate system).
- Operating a robot with PTP selected as an interpolation method will not result in the external TCP motion even if the attribute of the work coordinate system is set to "FixedTool(Fix)". This will only result in the normal operation.
- Auxiliary axes do not perform the external TCP motion.
- Arc interpolation motion cannot be performed with the external TCP function. (Executing the motion will cause an error.)
- The Arrive command and the WaitMotion command cannot be used with the external TCP function. (Executing these commands will cause an error.)
- During the motion using the external TCP function, even if the singularity avoidance function is enabled, the 4th axis may rotate by a large angle when the 5th axis passes by 0°, causing an error.
- Even if Posture Control is turned off in the setting, it will be active during the external TCP motion.
- The external TCP function cannot be used together with the conveyor tracking function.
- If you teach the free curve interpolation path points for the external TCP motion by using only rotational motion around X-, Y-, or Z-axis in the TOOL mode, the error [8120141D Division of path is required] may occur. When the error occurs, review the positions of the path points and the robot postures.
ID : 5666