
ID : 5777
Mechanical Interface Coordinates System
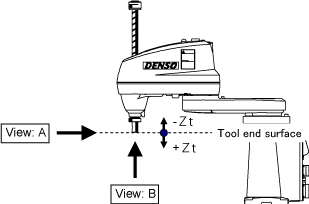
A tool mounting surface at the end of the robot arm is called a mechanical interface. For 4-axis robots, two types of mechanical interfaces are available, shaft type and flange type. In the standard specification of 4-axis robot, the mechanical interface is shaft. A flange is widely used option which facilitates to attach customer-prepared tool end.
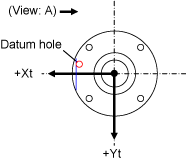
Three-dimensional Cartesian coordinates whose origin at the center of mechanical interface are called mechanical interface coordinates.
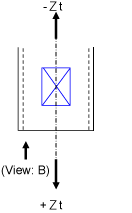
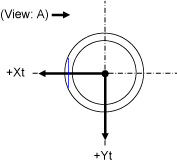
| Viewed from A | Viewed from B | |
|---|---|---|
|
Shaft type (standard specification) |
 |
 |
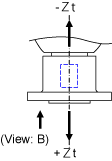
| Flange type |
 |
 |
ID : 5777