
ID : 6283
Encoder Reset
When using the AC servo motor for the first time, you need to initialize the counter circuit in the encoder (encoder reset).
If any of the encoder system down errors 85404671 to 85404674 occurs or, while the controller power is OFF, an excessive impact applied to the motor causes any of the encoder overspeed errors 85404681 to 85404684, user need to reset encoders and perform CALSET.
For the encoder resetting procedure, refer to the "Setting and Changing Encoder" of TEACH PENDANT OPERATION GUIDE.
Operation Using a Teach Pendant
Set user level "Maintainer".
Operation path: [F2 Arm] - [F12 Maintenance] - [Encoder] - [Reset Encoder]
1
The [Encoder Reset Setting] window is displayed.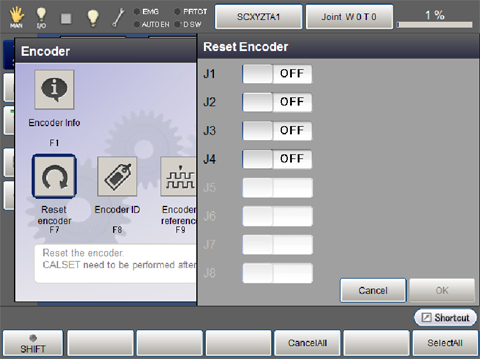
2
Select [ON] or [OFF] of the axis to be reset and press [OK]. A system message for confirmation appears.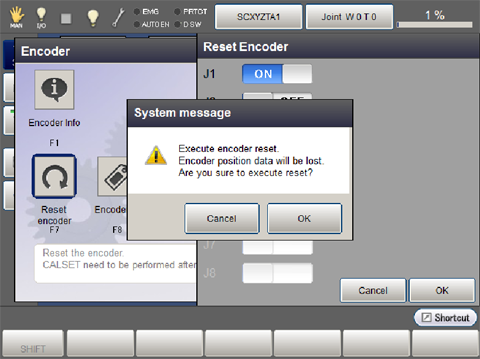
3
Press [OK] to reset the relevant encoder.
This is the end of encoder reset.
After encoder reset is complete, be sure to restart the robot controller.
ID : 6283