
ID : 18053
Communication Parameter Settings for Robot Controller
Set the communication parameters for robot controller.
Perform this setting in the off-line mode.
1
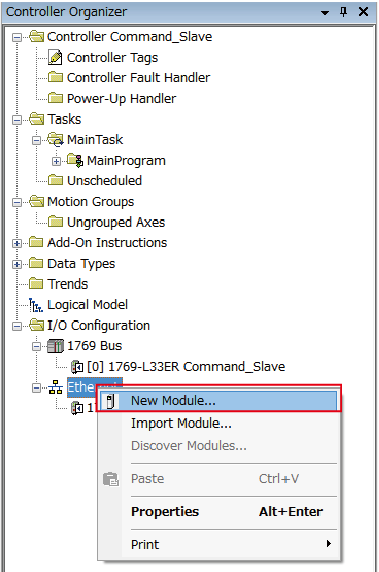
From the [Controller Organizer] pane, select [I/O Configuration] - [Ethernet] - [New Module].
2
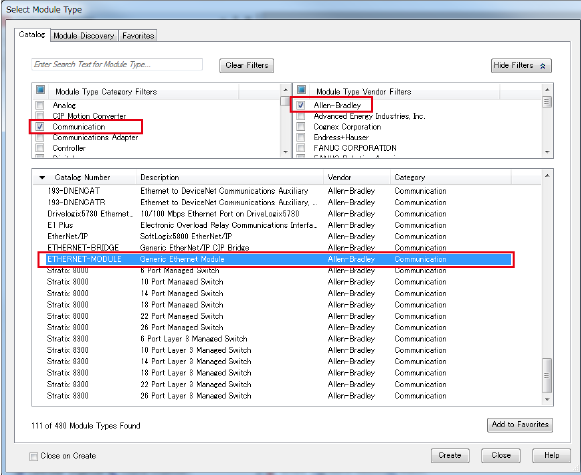
[Select Module Type] window appears.
Select [Catalog] tab. From the list on the bottom of the window, select [ETHERNET-MODULE](Generic Ethernet-Module), and then click [Create].
Filter function may help you to find data.
| Module Type Category Filters | Communication |
|---|---|
| Module Type Vendor Filters | Allen-Bradley |
3
[New Module] window appears. To specify a robot controller as a counterpart of communication, set each parameter as the following shows.
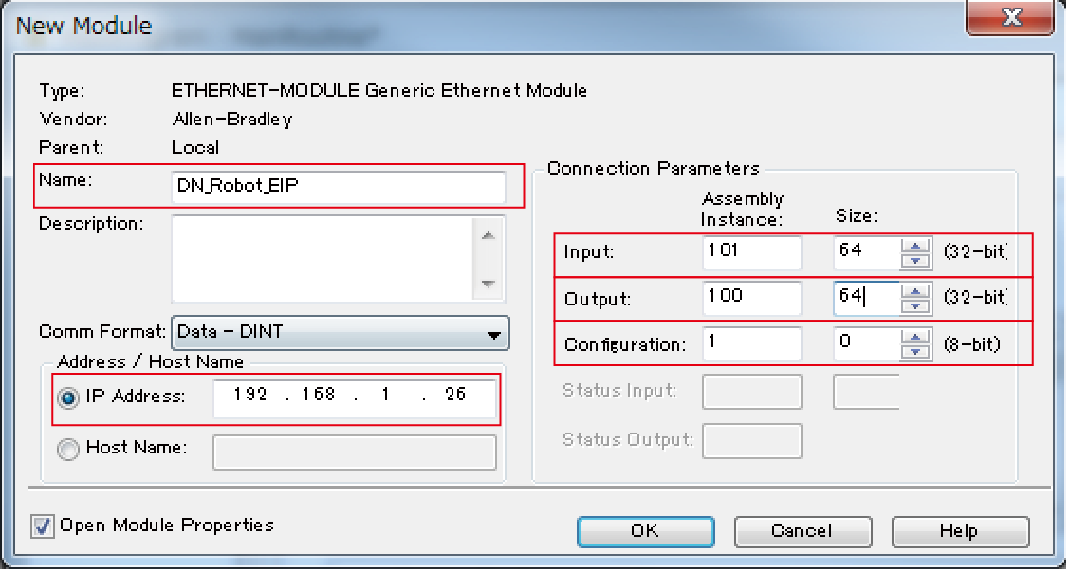
| Name | User-defined name (any name) | |
|---|---|---|
| IP address | Enter an IP address of the robot controller. | |
| Input | Assembly Instance | 101 |
| Size | Set the value calculated from the following formula. [Size]*32(bit) = [output size of robot controller’s EtherNet/IP adapter]*8(bit) A value between 64 to 125 can be set. |
|
| Output | Assembly Instance | 100 |
| Size | Set the value calculated from the following formula. [Size]*32(bit) = [input size of robot controller’s EtherNet/IP adapter]*8(bit) A value between 64 to 124 can be set. |
|
| Configuration | Assembly Instance | 1 |
| Size | 0 | |
Once all of the above entry has made, click [OK] to confirm the setting change.
4
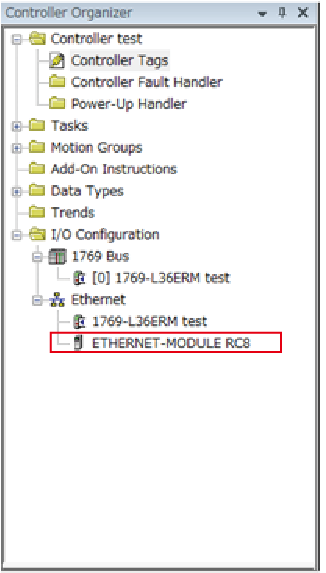
Check if the "ETHERNET-MODULE RC8" has been properly added.
5
In the [Controller Organizer] pane, double click [Controller Tags].
[Controller Tags] window appears. Check that the input Tags and output TAGs for robot controller have been properly created as you have specified in STEP3.
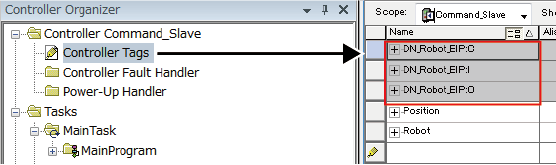
| Input tag | Name | User defined name :I |
|---|---|---|
| Data Type | DINT[Data size of specified input] |
|
| Output tag | Name | User defined name :O |
| Data Type | DINT[Data size of specified output] |
"User defined name :C" is an unused tag.
ID : 18053