
ID : 4083
Setting Tool Coordinates by Easy Teaching
Operation path : [F2 Arm] - [F6 Aux] - [F3 Tool] - [F4 Easy Edit]
Teach robot several points to register in the position coordinates (P type variable). Then, set the tool coordinates using data of the registered position coordinates.
For Overview, refer to "Simplified Tool Coordinates Definition".
For COBOTTA, you need to enter Rx, Ry, and Rz manually, whereas the X, Y, and Z are calculated automatically.
Press [F4 Easy Edit] to display the following [Tool coordinate setup by teaching * points] window.(The example of teaching 4 points are given in the figure.)
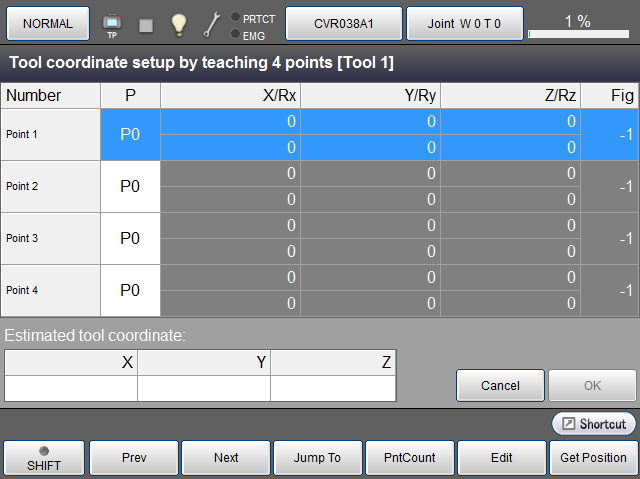
Confirm the value of "estimated tool coordinate" when all P type variables are registered. Then press [OK] to reflect the resulting coordinate in the tool coordinate number 1. If the "estimated tool coordinate" cannot be calculated, [OK] button is disabled.
| Available function keys | |
|---|---|
| [F1 Prev] | Move to the previous page of the currently displayed registered point number. |
| [F2 Next] | Move to the next page of the currently displayed registered point number. |
| [F3 Jump To] |
Display numeric keypad. Enter the registered point number to display with numeric keypad, and press [OK] to display the registered point of the specified number. |
| [F4 PntCount] |
Change the number of teaching points used for setting the tool coordinates. Numeric keypad will be displayed. Enter the point number to display with numeric keypad, and press [OK] to change the teaching point number. The settable teaching point number is from 3 to 10. |
| [F5 Edit] |
Display numeric keypad. Enter the P type variable number to register, and press [OK] on the numeric keypad to register the coordinates of the registered P type variable. |
| [F6 Get Position] |
Load a current position into a position coordinate (P type variable). Choose desired number and position coordinate(P type variable) and then press [OK] to load the current position. |
ID : 4083