
ID : 4089
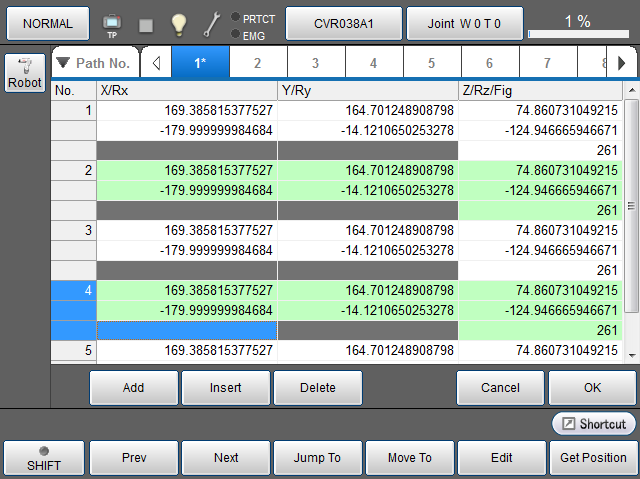
Path Points Setting Window
Operation path : [F2 Arm] - [F6 Aux] - [F6 PathPoint]
Set path points.
Press [F6 PathPoint] to display following [Path Points Setting] window.
Set path points, see "Setting Procedures of Path Points" .
| Keys other than function keys | |
|---|---|
| Robot | Display the current position information of the robot on the right-hand side of the window. |
| Path No. | Display the path data list, then select a path data to be displayed. |
| 1-20 tabs |
Select a path data to be viewed or edit. If a saved data and a displayed data(under editing data) are different, an asterisk is displayed on the tab. |
| Add | Enter a path point data in the next to the selected path point data, then input current position. |
| Insert | Insert a path point data in front of the the selected path point, then input current position. |
| Delete | Delete the selected path point data. |
| Cancel | Cancel edited data then close the path point setting window. |
| OK | Save edited data then close the path point setting window. |
| Available function keys | |
|---|---|
| [F1 Prev] | Scroll up the path point data. |
| [F2 Next] | Scroll down the path point data. |
| [F3 Jump To] | Select a path point number then display. |
| [F4 Move To] |
Moves the robot to the selected path point or performing free-curve. (Free-curve is available in Ver.2.7* or higher.) For details, refer to "Path Points Confirmation Window". |
| [F5 Edit] | Edit elements of the selected path point. |
| [F6 Get Position] | Overwrite the current position on the selected path point data. |
| [F8 Copy] |
Copy path point value. Select a path point number to be copied, then click [F8 Copy]. |
| [F9 Paste] |
Paste the copied path point value. Select the path point value to be pasted, then click [F9 Paste]. |
| [F11 Robot] | Display the current position information of the robot on the right side of the window. |
ID : 4089
- Related Information
- Setting Procedures of Path Points
- Path Points Confirmation Window