
ID : 7327
Path Points Confirmation Window
This section describes how to confirm the path points with the Remote TP/Virtual TP.
Also, it describes how to move the robot to the specified path point with PTP/CP motion, and how to move the robot on the specified path with free curve motion.
Move the Robot to the Path Point with PTP/CP Motion
The following shows how to move the robot to the path point when the robot is not exist in the selected path points.
1
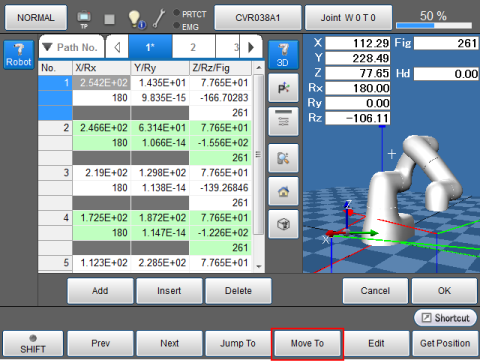
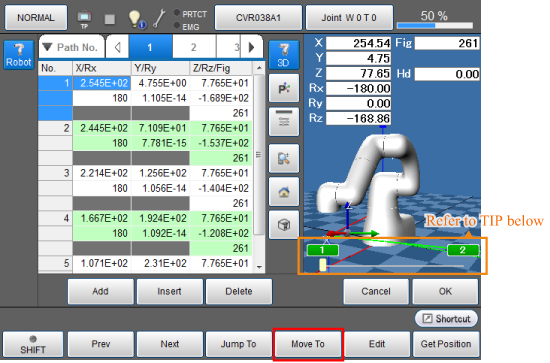
Operation path : [F2 Arm] - [F6 Aux] - [F6 PathPoint]
Once the path point setting window appears, press the desired [Path No.], enter the parameters of the selected path point. Selected path point is colored blue.
2
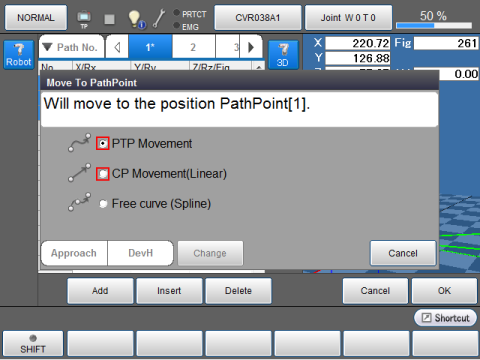
Pressing [Move To] displays [Mote To PathPoint] window. Select [PTP Movement] or [CP Movement (Linear)].
3
Press the [ON] button under [MOTOR] of the Remote TP/Virtual TP and press the [OK] button.
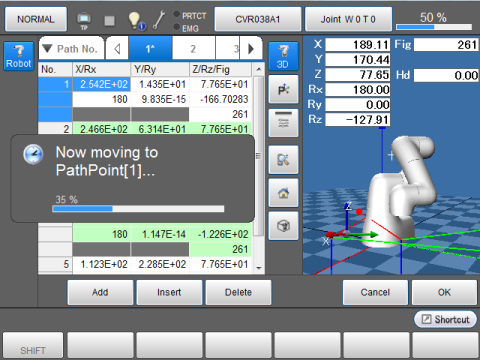
The robot keeps moving while the [OK] is pressed. The robot stops once it reaches the target point.
Operation Procedure for the Free Curve Motion
The following shows how to perform the free curve motion of the specified path number on the Setting Procedures of Path Points.
This function is available in Ver.2.7 or higher.
Preparation
For operating the robot with free curve motion in the [Path Points Setting] window, you need to set [253: Use a start point in spline curve] to (1: Enable).
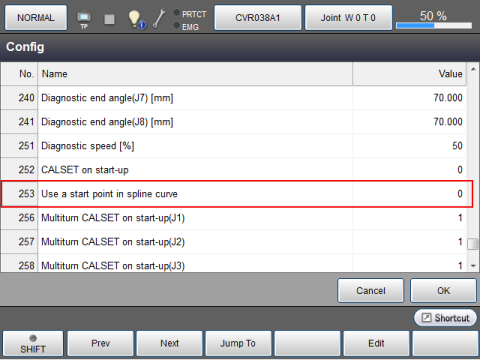
For the setting procedure, refer to the Operation Guide "Displaying and Setting the Configuration".
Operation Procedure
1
Operation path : [F2 Arm] - [F6 Aux] - [F6 PathPoint]
Once the Path point setting window appears, press [Move To].
If the current position is out-of-path points, when the path point setting window appears, the path number icon is colored gray. If the current position is in any path point, the path number icon is colored green. (Ver.2.7.* or higher)

2
Once the [Move To PathPoint] window appears, select [Free curve (Spline)].
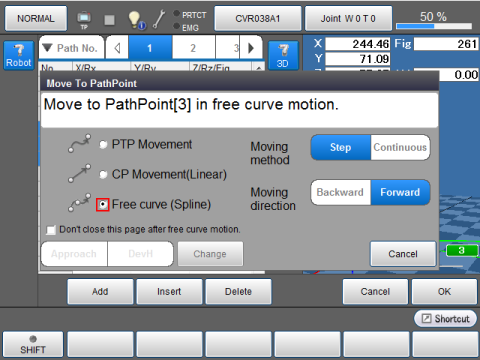
Select the moving method and moving direction.
| Moving method | Motion Direction | |
|---|---|---|
| Forward | Backward | |
| Step | Move to the next path point. |
Back to the previous path point. |
| Continuous |
Continuously move to the last path point. |
Continuously move to the first path point. |
If you want to keep the path point setting window open after the motion complete, select the check box of [Don't close this page after free curve motion].
-
[Use a start point in spline curve] of [Config] is set to (1:Enable), the [Moving method] and the [Motion Direction] are displayed.
-
You can change the motion direction by using the left and right keys on the Remote TP/Virtual TP.
3
Press the [ON] button under [MOTOR] of the Remote TP/Virtual TP and press the [OK] button.
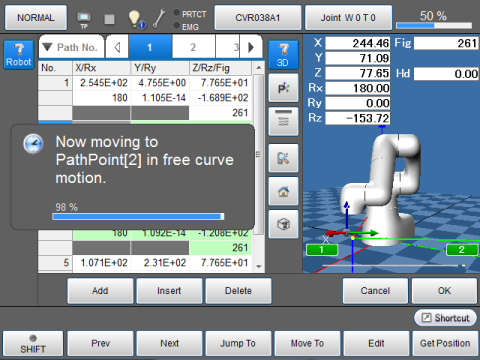
From the current position, move the robot to the nearest position on the path. Move the robot to the nearest path point through the path with free curve motion. The robot keeps moving while the [OK] is pressed. The robot stops once it reaches the target point.
If the first and the last path points are the same position, or if the path goes through an identical path point twice or more with different robot posture, when you perform [F4: MoveTo] - [Move To PathPoint] - Free curve (Spline), the robot may move unexpected way.
ID : 7327