
ID : 7306
Setting of Occurrence of Errors During Collision Detection
Use the Remote TP/Virtual TP or command to set the occurrence of errors during collision detection.For details of the command, refer to "SetCollisionDetection."
If the error occurrence is set to [No], the robot will not output an error and will not stop even if it detects a collision. If you want to control the robot from an external device (such as PLC) and stop the robot by control from the external device when the robot detects the collision, please set the error occurrence to [No]. The status of collision detection can be acquired by using "GetCollisionStatus".
Setting Procedure
This page contains a description of setting procedure with the Remote TP/Virtual TP operation.
1
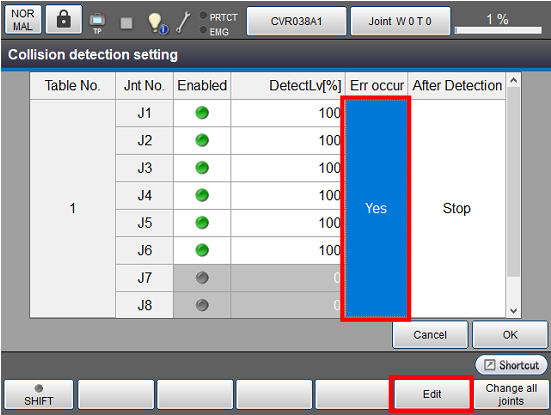
In the [Collision detection setting] window, select the [Err occur] column and press [F5 Edit].
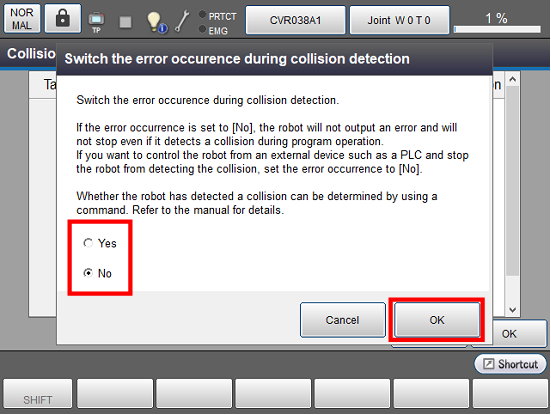
The [Switch the raising errors during collision detection] window appears. Select [Yes] or [No] and press [OK].
Press [Cancel] to stop changing the settings.
2
Confirm that the setting is changed and press [OK].
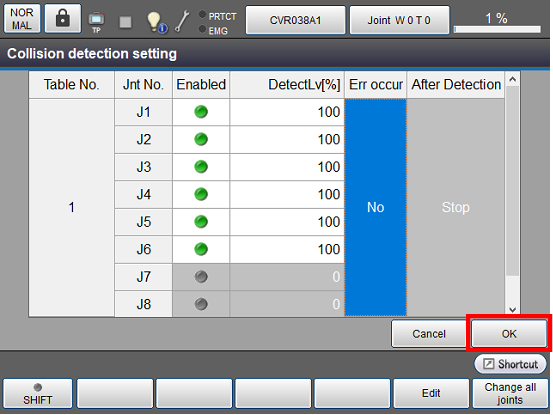
The settings are saved.
ID : 7306