
ID : 7303
Operation Procedure
The setup procedure of the collision detection function is explained below.
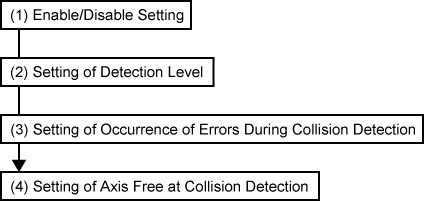
(1) Enable/Disable Setting
The collision detection function is enabled/disabled for each axis.
The function is enabled for all axes by default.
(2) Setting of Detection Level
The collision detection sensitivity (detection level) is set for each axis.
The sensitivity is set between 0 and 1000 [%]. When the value is high, the sensitivity is low; when the value is low, the sensitivity is high.
The sensitivity is set to 100 [%] for all axes by default.
(3) Setting of Occurrence of Errors During Collision Detection
Sets the occurrence or non-occurrence of error at the time of collision.
By default, error occurrence is enabled.
(4) Setting of Axis Free at Collision Detection
Sets whether to stop a robot on the motion path or to stop the robot after the robot is set to the axis free status after collision detection.
The initial value is set to stop the robot on the motion path at collision detection.
ID : 7303