
ID : 2665
Setting of Axis Free at Collision Detection
By using the Remote TP /Virtual TP or command, set whether to stop a robot on the motion path or to stop the robot after it is set to the axis free status at collision detection. For details of the command, refer to "SetCollisionDetection."
This setting is effective to reduce the damages due to the collision and prevent from getting caught.
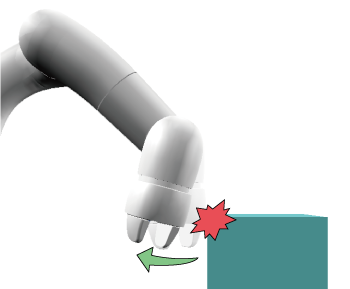
- Axis free
- In this status, the axis can be flexible, and the posture of the robot can be changed by an external force.
Precautions
- Depending on the setting of the motion speed at collision and mass of payload, COBOTTA may keep moving after collision. Also, regardless of the speed setting, COBOTTA may change the posture with speed more than the setting.
- Depending on the posture at collision detection, amount of the posture change by the axis free may be a little (not enough). In that case, it may be difficult to evacuate from the collision object compared with a case that amount of the posture change is a lot.
- If collision is detected when using the electric vacuum generator, the motor of the electric vacuum generator will be turned off simultaneously with end of the axis free status. Please note that when the motor is turned off while a workpiece is gripped, the workpiece will fall.
Description of Functions
If you set the axis free, all axis of COBOTTA will be free at collision detection. When it is in the axis free status, posture of COBOTTA will be changed by impact of collision.
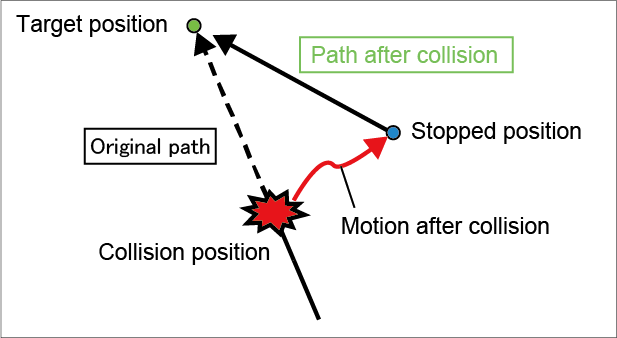
After that, if at least one of the following conditions is met, the axis free setting is canceled and it puts the robot to Continue Stop.
- COBOTTA motion stops.
- One second elapse from collision detection.
- Any axis moves 10° or more from the collision position.
After Continue Stop, when you restart a program, COBOTTA moves from the stopped position to the target position.
However, under the following condition, the error will occur and Continue Start cannot be executed.
| Condition | Error | |
|---|---|---|
| Error Code | Description | |
Robot moved and exceeded "Allowance for position restoration arm" from the detected position (Factory default: 10 degrees for all axis). For the setting of "Allowance for position restoration arm", you can check by "Displaying and Setting the Configuration". |
0x83201412 | Stopped position and restart position is different. |
| Robot collided while Move C, Move S, Rotate commands were executed. | 0x84201578 | Collision detected during circular or spline movement. |
This setting is enabled in either of the following conditions.
- PacScript is activated.
- The control of robot is acquired from an external device.
For cases other than above, the robot will stop on the motion path even if you set the axis free. For example, when moving with variables in the variable window, even if it collides, the robot will not be in the axis free status.
If it is executed as a supervisory task, the robot will not be in the axis free status even if PacScript is activated.
Setting Procedure
This page contains a description of setting procedure with the Remote TP/Virtual TP operation.
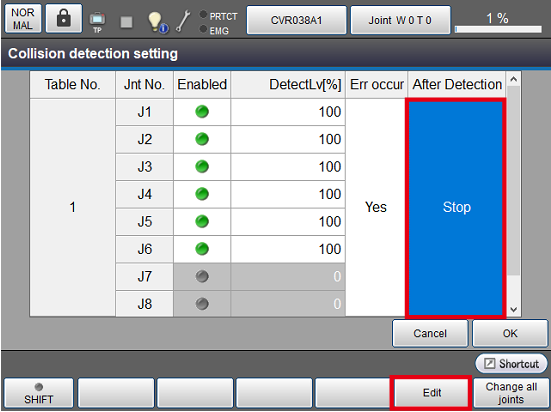
1
In the [Collision detection setting] window, select the [After Detection] column and press [F5 Edit].
If [Err occur] is set to [No], the [After Detection] column cannot be selected.
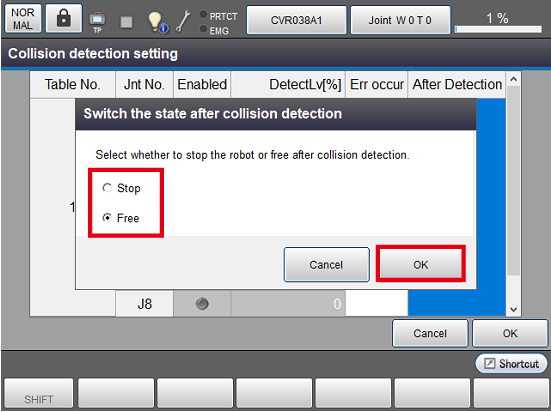
2
The [Switch the state after collision detection] window appears. Select [Stop] or [Free] and press [OK].
If you press [Cancel], the setting will not be changed.
3
Confirm that the setting is changed and press [OK].
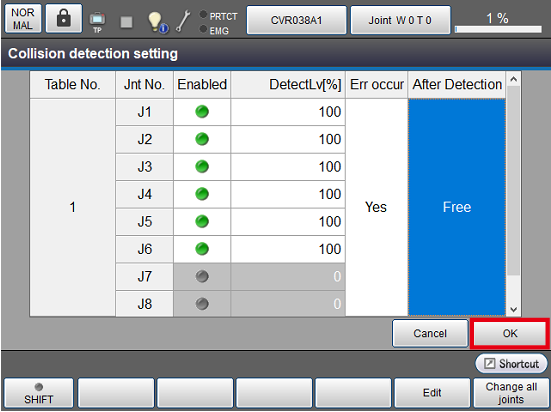
If [After Detection] is set to [Free], pressing [OK] will display the system message.
Check the content of the message and press [OK].
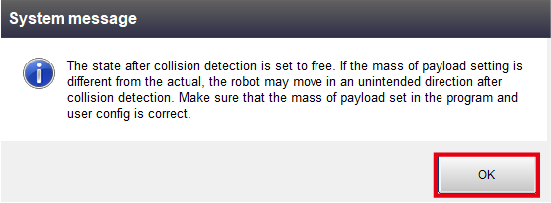
The settings are saved.
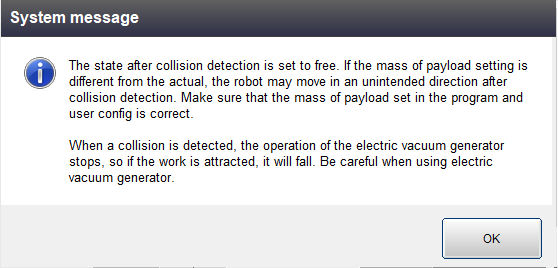
When the electric vacuum generator is used, the following system message will be displayed.
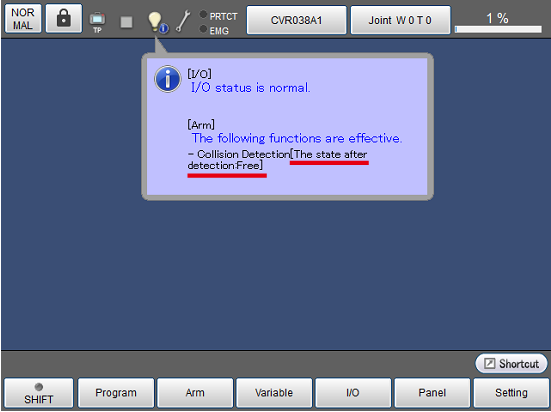
You can check the current setting by pressing the light bulb icon of the Remote TP /Virtual TP.
ID : 2665