
ID : 7305
Setting of Detection Level
The detection level of collision (sensitivity) can be set for each axis in the rated ratio [%] by using Remote TP/Virtual TP or a command. The input range is between 0 and 1000 [%]. When the value is high, the sensitivity is low; when the value is low, the sensitivity is high.
For setting the detection level, make the robot execute the whole program with no error output for the first time.
Record the control log in this state and set the level based on the data.
After setting the level, return the program settings to having error output.
For the second and subsequent adjustment, the state of no error is not required for the settings.
The setting performed by Remote TP/Virtual TP will be retained even after turning off COBOTTA. The setting performed by the command will be reset to the previous one after turning off COBOTTA.
For details of the command, refer to "SetCollisionDetection".
Setting Procedure
The setting procedure using Remote TP/Virtual TP operation is indicated below.
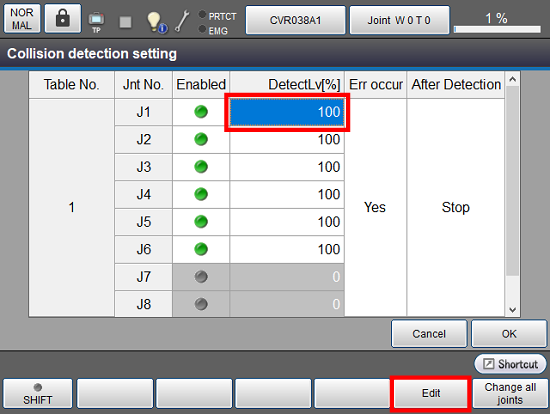
1
In the [Collision detection setting] window, select the axis numbers for which to set the detection level and press [F5 Edit].
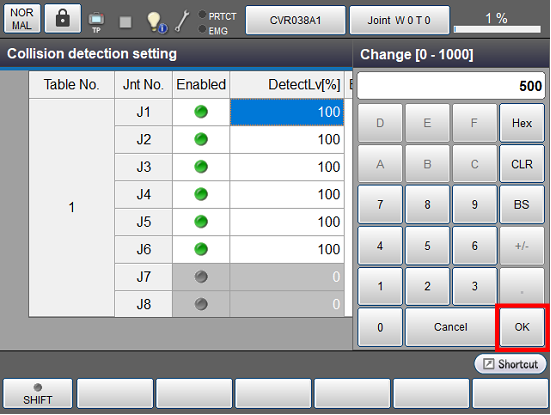
2
Use the numeric keyboard that appears to enter the value and press [OK].
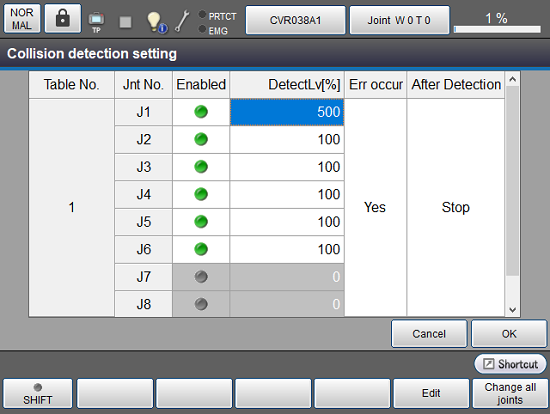
The entered value is displayed as follows.
3
Enter the level for the axes requiring setting according to STEP1 and STEP 2.
4
When you have completed setting all the axes, press [OK].
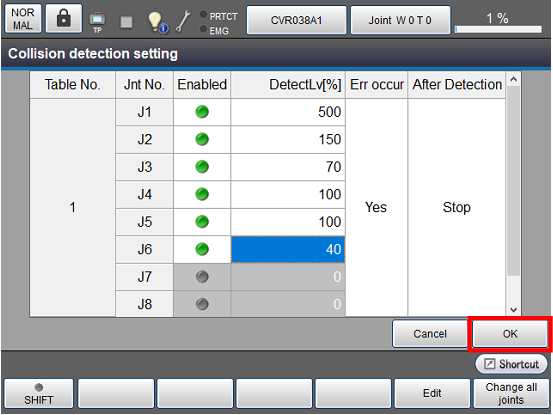
The settings are saved.
ID : 7305