
ID : 1615
PTP Control
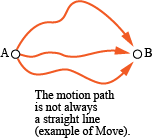
PTP (Point to Point) can be defined as the movement from one point to another point. The path on which the robot moves depends on the robot posture and is not always a straight line.
The figure below shows an example of motion by PTP control.
If "P" is specified when designating the interpolation method with the motion control command (with 0 or more specified as the robot figure), the robot executes the PTP motion.
If a Type P or Type T variable is designated as the PTP motion destination position and also a robot figure is designated, the robot moves so that the robot becomes the designated robot figure. You can use a function that automatically chooses an optimal robot figure by specifying a certain value as a robot figure. For details, refer to the "Automatic Figure Selection Function (Auto Fig)".
ID : 1615