
ID : 1808
Mini-Pendant
The mini-pendant is an entry/operation device for operating the robot manually, starting programs, and teaching. It has no programming function.
Using the mini-pendant together with WINCAPSIII or WINCAPSIII Light enables efficient programming and teaching.
Mini-Pendant Functions
For instructions on how to operate the mini-pendant, refer to the SETTING-UP MANUAL.
Teaching
This function allows you to store the robot arm position (limited to editing of P variables and J variables). You can check edited programs in running them step by step.
Operating the robot
This function controls motor power ON/OFF, starts/stops automatic operation, and enables StepStart/StepBack and manual operation.
Displaying
This function displays the current robot arm position, running program number, ongoing step number or error codes.
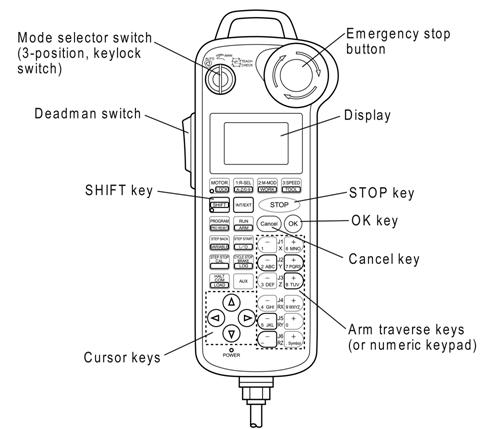
Names of Mini-Pendant Components
The figure below shows the names of the mini-pendant components.
|
ID : 1808