
ID : 1938
Base Coordinates and Work Coordinates
Base Coordinates in 6-Axis Robots
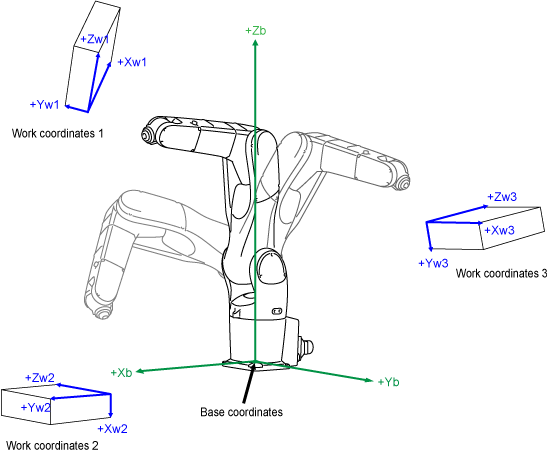
Base coordinates are 3-dimensional Cartesian coordinates with its origin at the center of the robot base. It has components Xb, Yb, and Zb which are identical with X, Y, and Z in X-Y mode.
Work Coordinates in 6-Axis Robots
Work coordinates
are 3-dimensional Cartesian coordinates defined for each operation space of
workpiece. The origin can be defined anywhere and as much as needed. It lies at
a corner of the rectangular parallelepiped envelope of an object workpiece as
shown below. Work coordinates are expressed by the coordinate origin (X, Y, Z)
corresponding to the base coordinates and the angles of rotation (RX, RY, RZ)
around X, Y and Z axes of base coordinates.
Up to seven work coordinates can be defined and assigned work coordinates #1 to #7.
If work coordinates are not defined, base coordinates go into
effect.
ID : 1938