
ID : 1985
Cooperative Motion
Function Overview
Multiple robots move with keeping the relative position relationship between tool end of respective robot. With this function, you can easily create a program that includes multiple robot operations.
Example:Transporting a Workpiece
Assuming that two robots move a plate-shaped workpiece together. Robots tilt the workpiece at transporting.
| The right figure assumes that when the left robot moves, the right robot moves accordingly. In this case, the left robot and right robot are called the "leader" and "follower" respectively. | 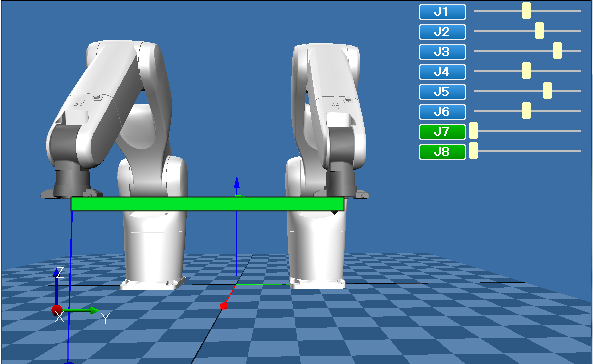 |
| Move the tool end of the leader downward and change the angle. | 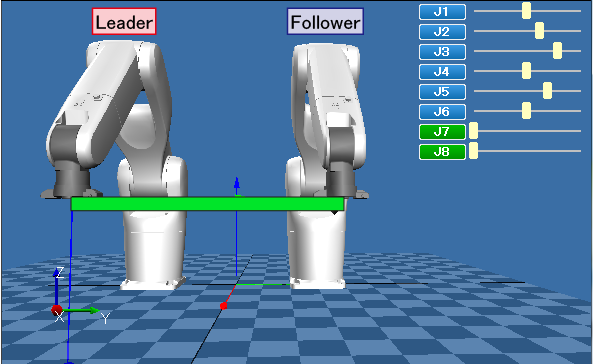 |
| The follower moves according to the leader's motion. | 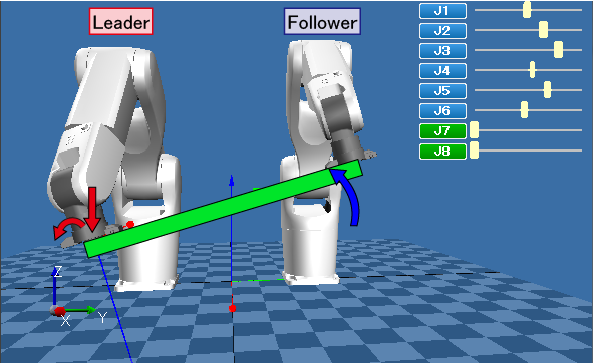 |
As shown above, when a leader robot is specified and moved, the follower robot is interlocked with the motion. This means that creating a robot program only for the leader's motion includes the follower's motion.
In addition, it may be easier to teach if a different robot is set to the leader for each motion. Therefore, the leader can be changed for each motion in a robot program.
Extended-Joint
When extended-joints are used, an axis on the follower with the same extended-joint number as that of the leader moves the same motion distance.
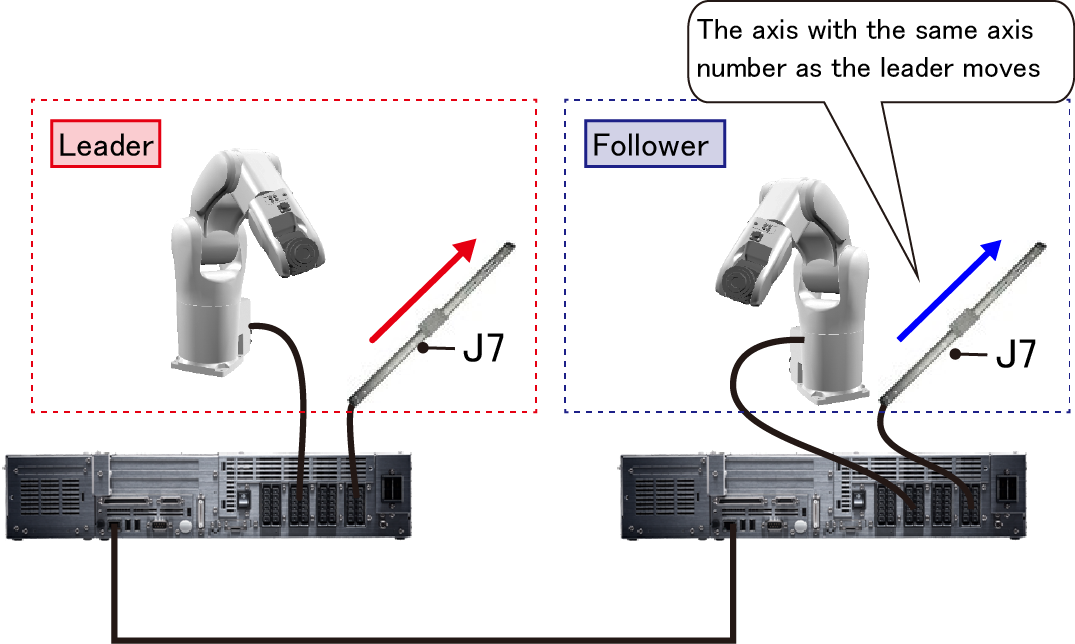
Only motion distance and timing are the same. Actual robot motion depends on the settings and facilities installation environment.
Programming
This motion is specified by SyncMove of motion option.
ID : 1985