
ID : 1987
World Coordinate System
Function Overview
World coordinate system is a coordinate system whose origin is specified by a user. This system enables multiple robots to use a common coordinate system for position designation.
By setting the origin of the facilities to that of the world coordinate system, you can set positions of different robots on the same coordinate system.
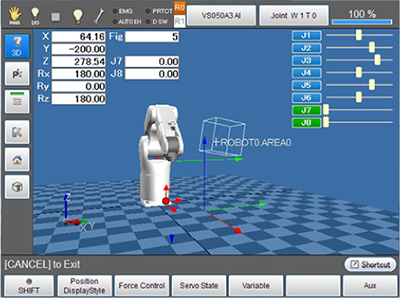
| Without using World coordinate |
Specify a position with a coordinate system whose origin is a robot base position. Positions of areas and workpieces are based on the robot base position.
|
|---|---|
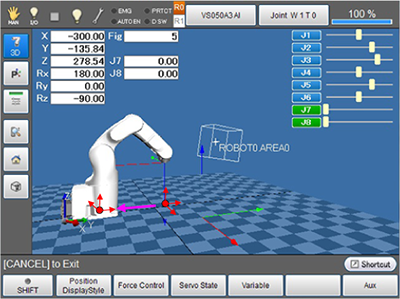
| World coordinate system |
Specify a position with a coordinate system whose origin is specified by a user. Positions of areas and workpieces are based on the world coordinate system as well. (excluding tool)
|
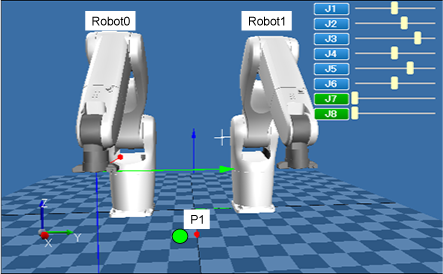
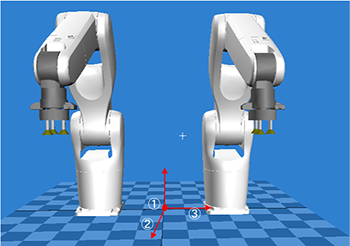
In the following example, since the position of P1 on the world coordinate system is the same for Robot0 and Robot1, you can easily create a program.
Program Example
Robot0.Move P,P1 'Robot0 moves to P1 position
Robot1.Move P,P1 'Robot1 moves to P1 position
World Coordinate System in the Cooperative Control Function
Before starting the cooperative control function operation, you need to specify a base position (base coordinate) viewed from the world coordinate system for all robots.
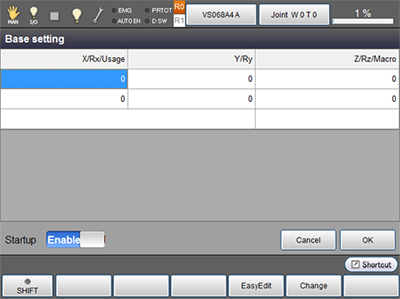
Specifying the Base Coordinate with a Teach Pendant
There are two ways to specify a base coordinate on the world coordinate system; "Enter immediate values" and "Easy Edit window".
| Enter immediate values |
Directly specify each value of X, Y, Z, Rx, Ry, and Rz.
|
|---|---|
| Easy Edit window |
Specify the following three points against the base position to figure out the base coordinate automatically. (1)Coordinate origin (2)X-axis direction (3)A given point on the X-Y plane
|
Specifying the Base Coordinate on a Program
Use Base command to specify the base coordinate.
ID : 1987