
ID : 1986
Synchronous Motion
Function Overview
Multiple robots synchronously work together to complete a set of tasks. This motion allows you to achieve multiple operations that need to be done with given timing.
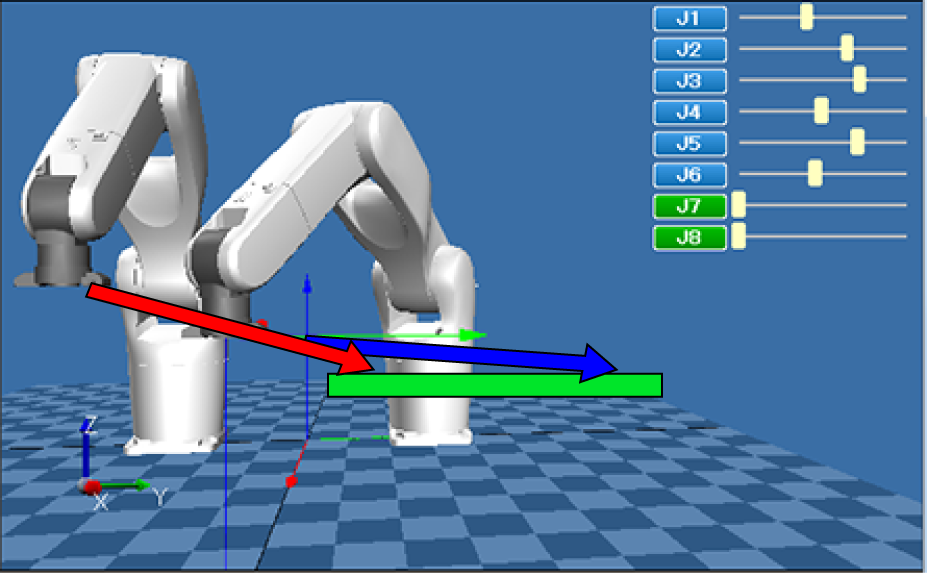
Example: Moving to the Gripping Position
Assuming that the master robot and slave robot are close to each other. Move two robots from the current positions to the next positions without contacting with each other.
When the Synchronous Motion is not Used
You need to create programs for adjusting at least following timings among different controllers. To achieve precise operation, you are required to create more complicated programs.
- Check that whether any other robots complete its motion.
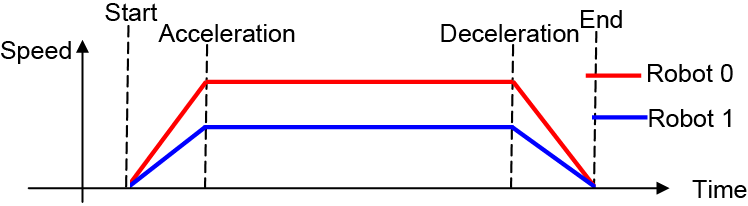
- Check that the motion speeds of all robots are the same.
- Start the motion of all robots simultaneously.
- When a robot finishes its motion, notify the completion to others.
When the Synchronous Motion is Used
Since the robot controller automatically adjusts the operation timings among different robots, you have no need to create programs for that.
Programming
This motion is specified by SyncTime.
ID : 1986