
ID : 2454
Moving Each Axis with Motor Power OFF in an Emergency Stop or When a Worker Trapped by the Robot
This section describes how to move each axis with the motor power being OFF at the time of an emergency stop or when a worker is trapped by the robot. Note that moving the 3rd (Z) and 4th (T) axes requires releasing their brakes beforehand.
Performing the brake release operation drops the Z axis. Make sure beforehand that the release operation will not cause bodily injuries or equipment damages.
Le desserrement du frein provoque la chute de l'axe Z. Vérifier au préalable que le desserrement du frein ne risque pas de provoquer des blessures ou d'endommager l'équipement.
Moving the Axes in an Emergency Stop
| Axis | How to move the axes | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 1st axis | Move the robot arm by hand. | ||||||||
| 2nd axis | |||||||||
| 3rd axis (Z-axis) |
Release the brake of the motor and move the axes by hand. To release the brake as shown below.
|
||||||||
| 4th axis (T-axis) | |||||||||
|
|||||||||
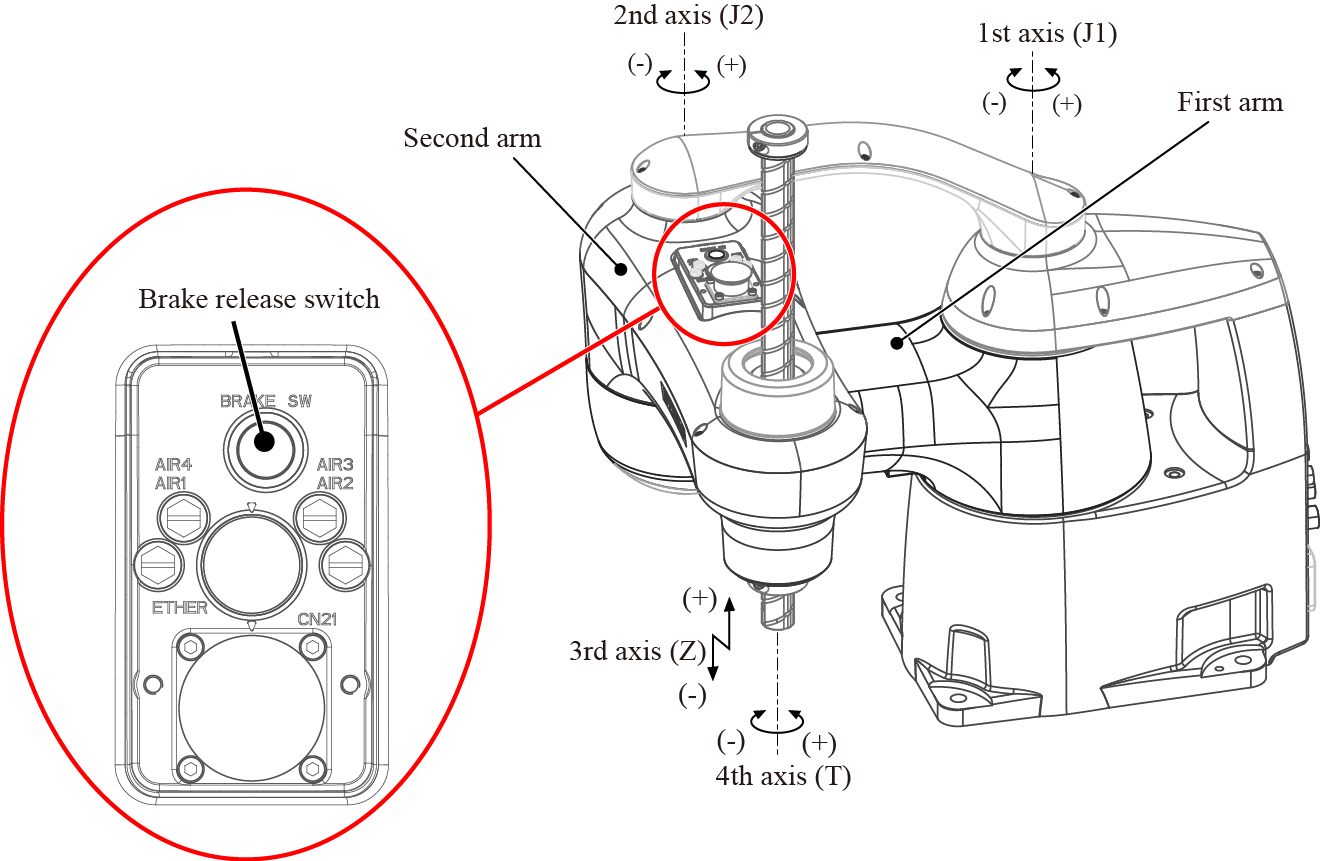
When moving the robot by hand, hold by a part other than the plastic cover.
ID : 2454