
ID : 3060
Auto Measuring Mass of Payload
The following explains the procedure of this option by exemplifying HSR, HSA1 robots.
1
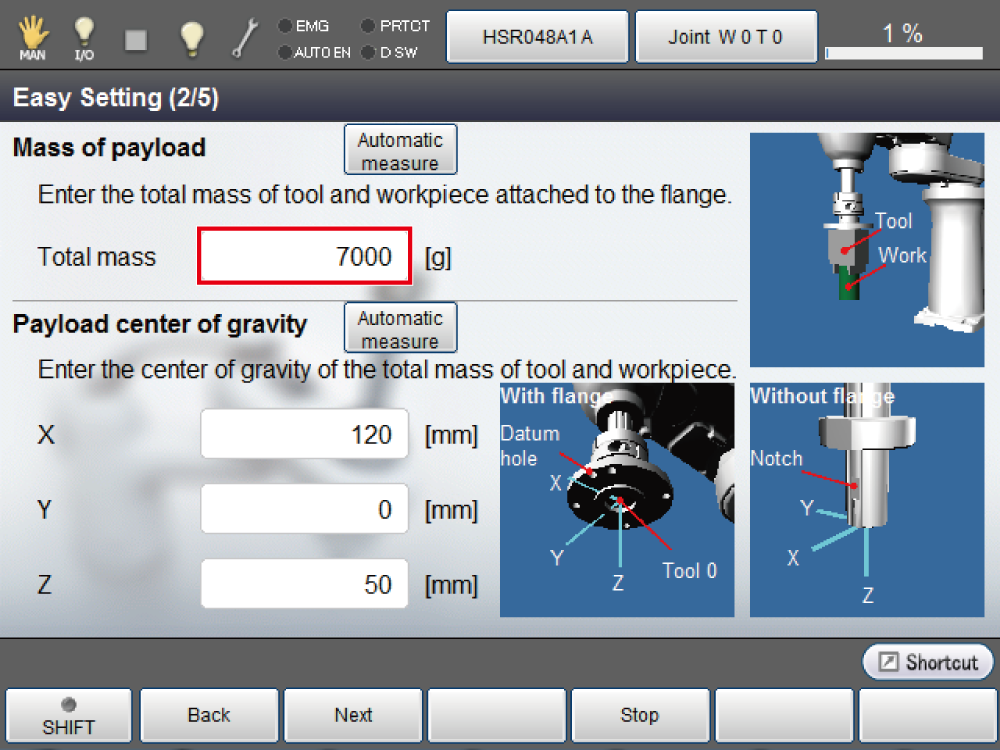
Press [Automatic measure] button in the window of [Easy Setting] - [Mass of payload].
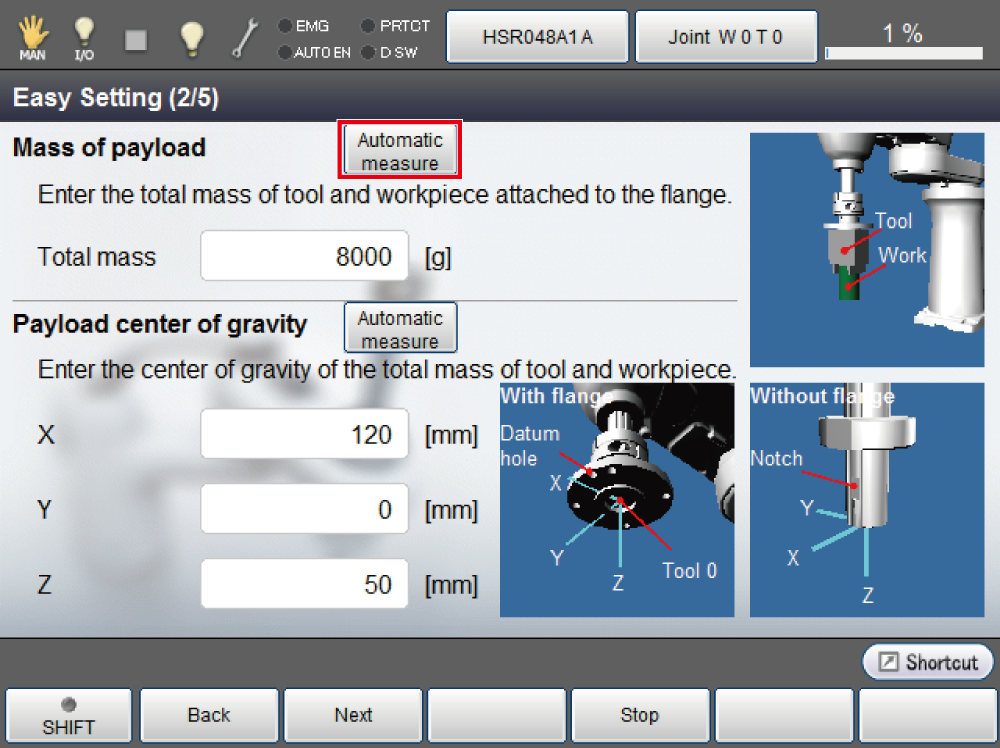
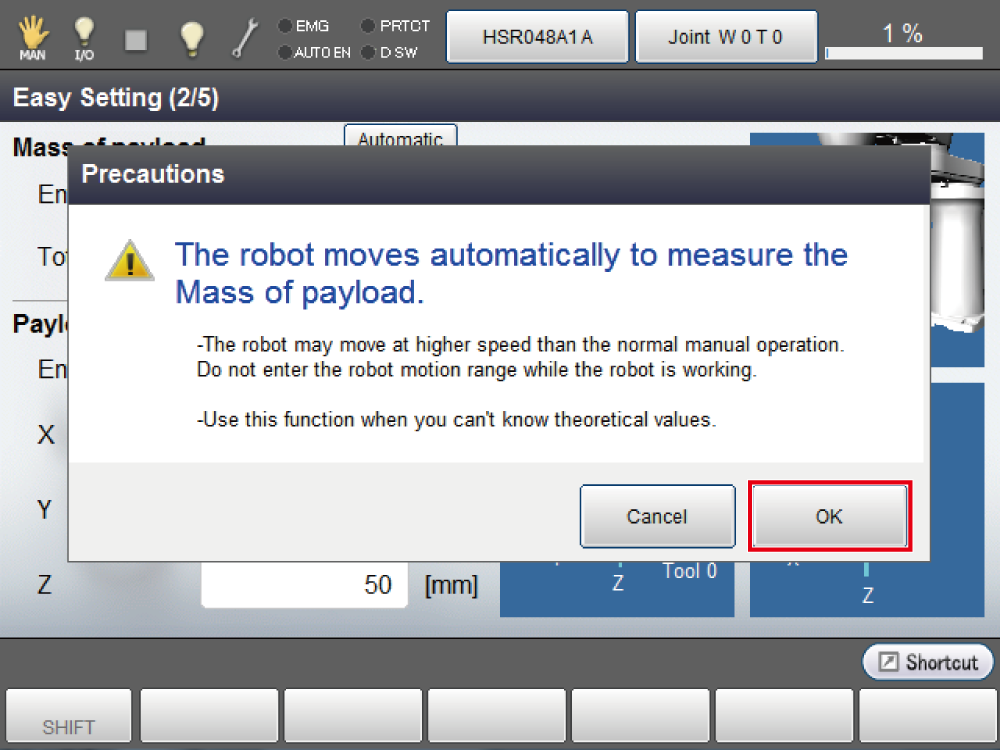
Information of how a robot performs and caution about measuring will be shown in the window of Payload Estimation.
After confirming the message, press [OK].
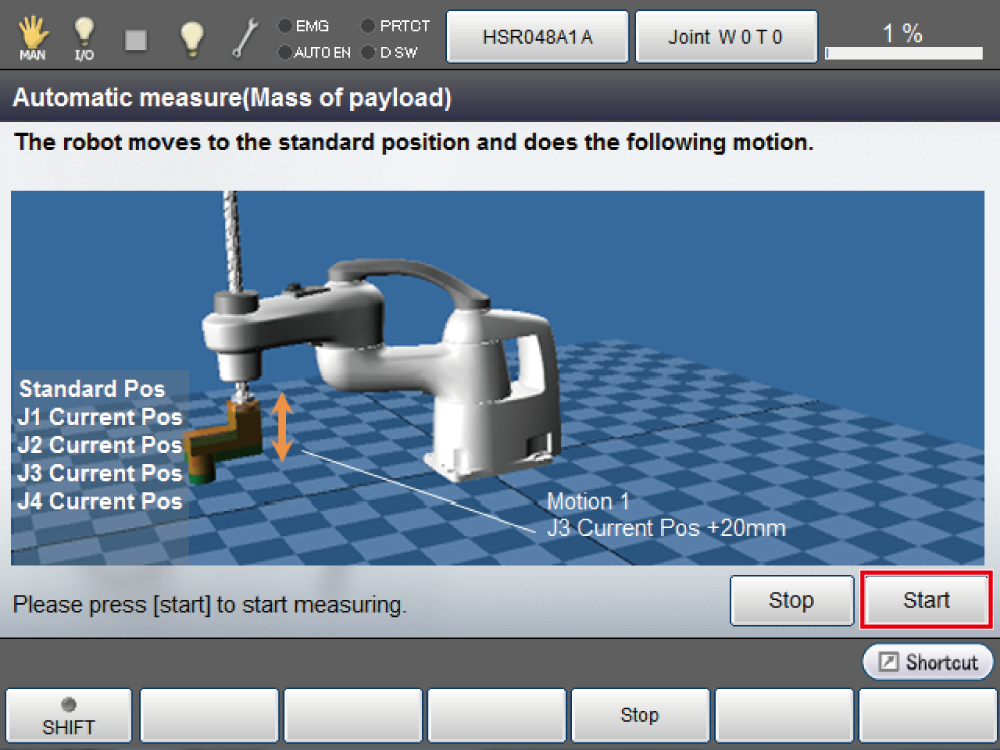
Automatic measure window is displayed.
Press [Start].
If the value of mass of payload (calculated value) is sure, use that value.
2
While pressing the deadman switch, press [MOTOR] key to turn on, and then keep pressing OK key.
Measurement of the motion at lower speed is performed.
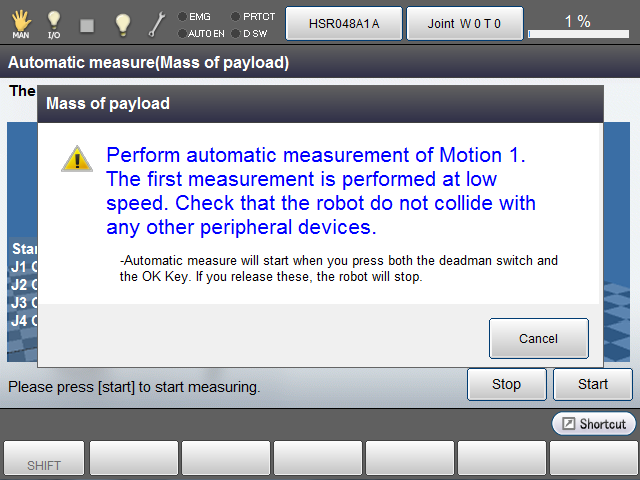
- Make sure that the robot's hand and/or other things won't interference with any other equipment.
- Do not enter the robot motion range because the robot may move at higher speed than the normal manual operation.
(Small window appears while processing)
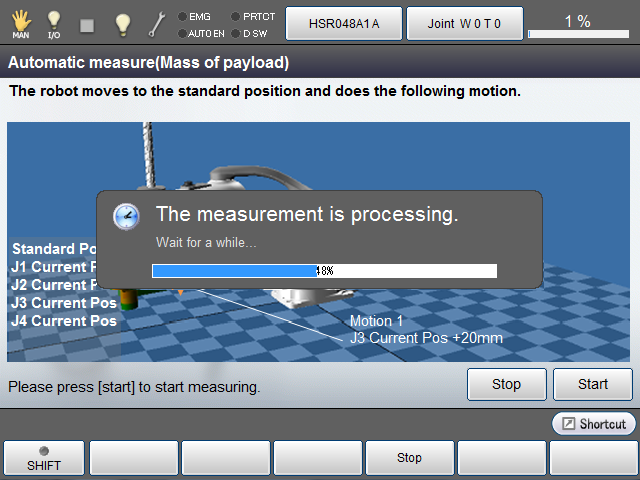
Keep pressing the deadman switch until measuring is finished.
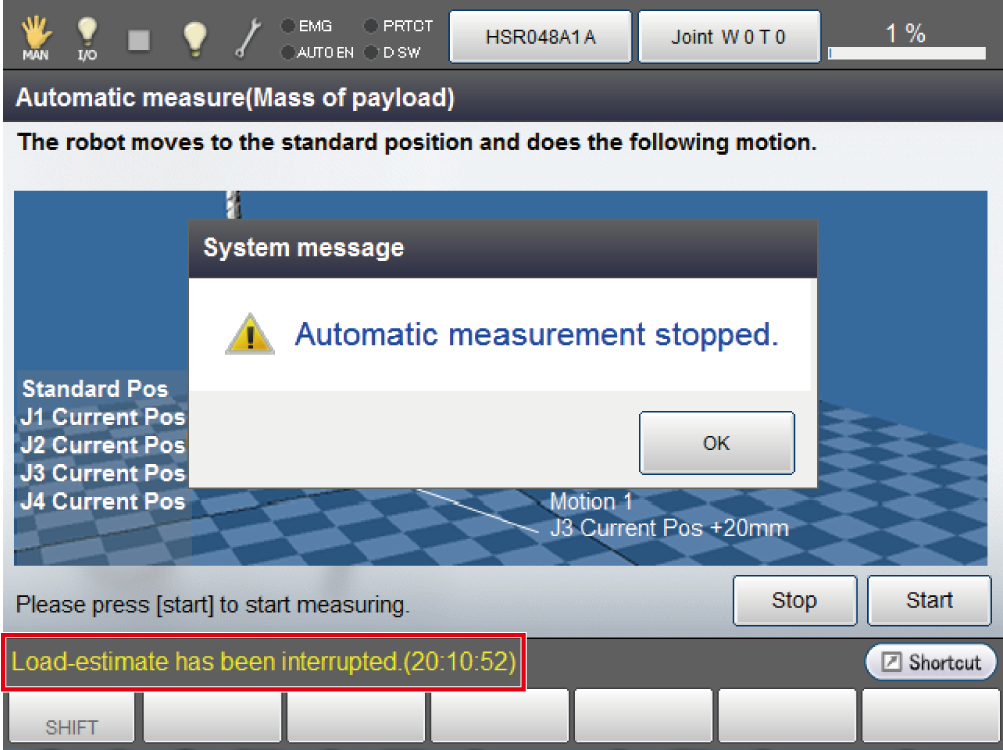
If you release the deadman switch or OK key during measuring, the automatic measurement will be interrupted.
3
Once the measurement of the motion at lower speed is finished, the motion at higher speed will be measured.
Keep pressing the deadman switch and OK key.
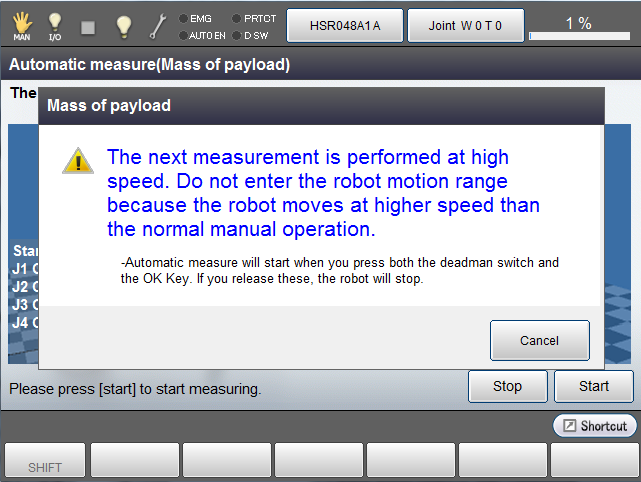
Do not enter the robot motion range because the robot moves at higher speed than the normal manual operation.
4
If the measurement value locates inside of the maximum allowable range, measuring is completed.
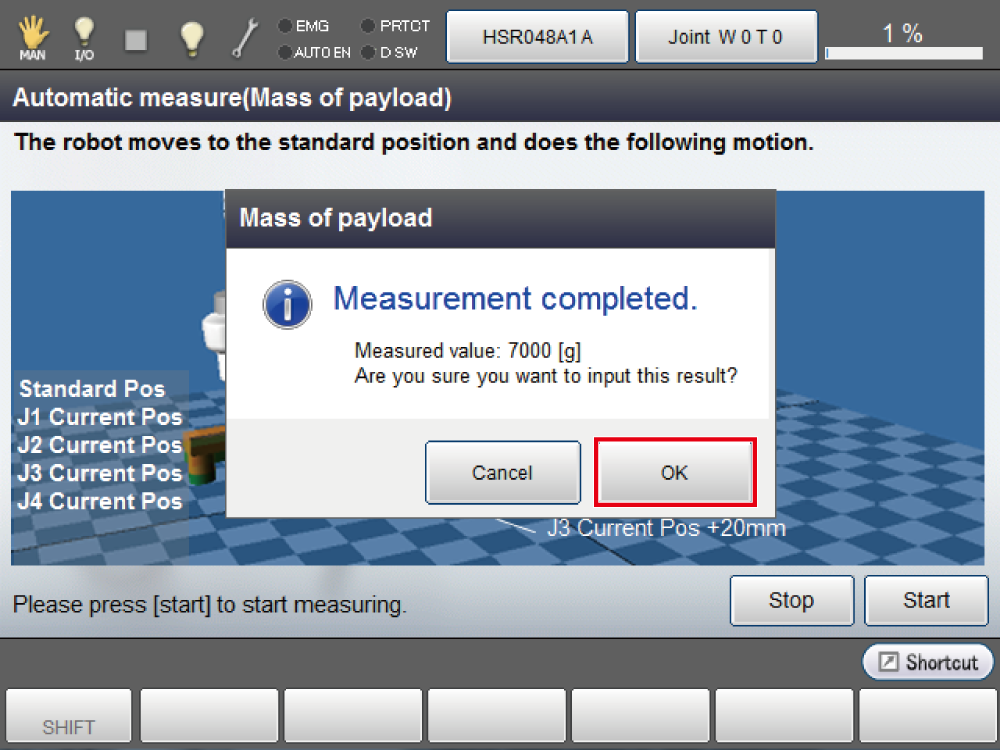
Press [OK] to return the window of [Easy Setting]. The measured value of mass of payload is inputted.
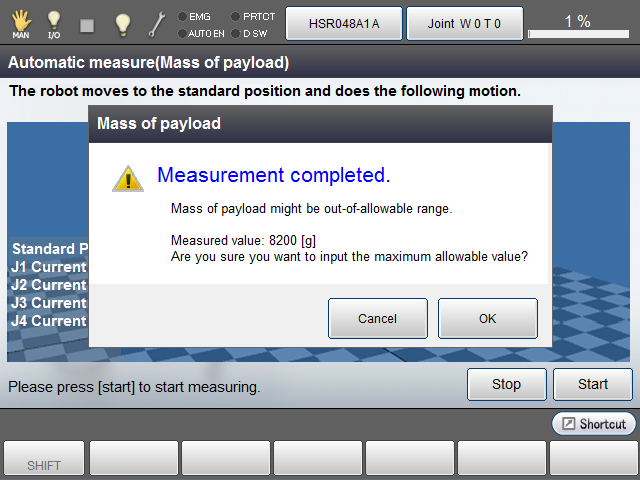
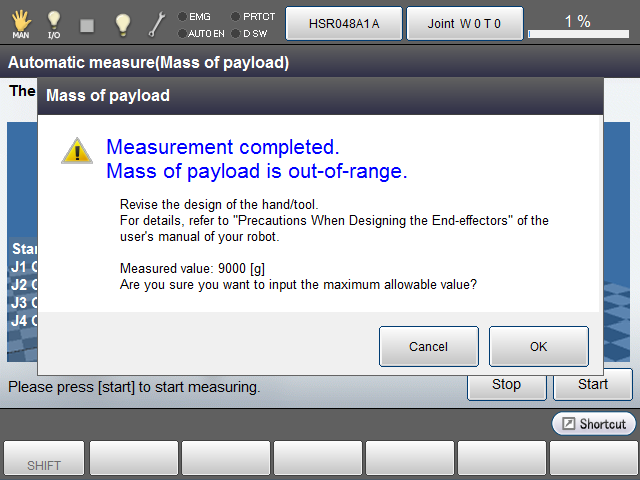
If the measurement value locates outside of the maximum allowable range, the following message will be displayed.
- If the measurement value locates near the maximum allowable range
- If the measurement value locates outside of the maximum allowable range
Ensure that if pressed "Cancel" in the window of Automatic measurement and the window returns to [Easy Setting] - [Mass of payload], the measurement value cannot be inputted.
ID : 3060