
ID : 2835
Payload Estimation Function
Payload estimation function is able to estimate mass of payload, center of gravity and payload moment of inertia Iz by letting a robot perform specific actions. This function can be used when setting "Mass of payload", "Payload center of gravity" and "Payload moment of inertia". This is available in Ver.2.1.* or higher.
- Do not use Current Limiting Function (CurLmt, ZForce), Servo Lock unlocked (SrvUnLock) and Gravity Offset Compensation Function (GrvOffset) at the same time.
- Disable the monitoring function of Safety motion. Error will be shown if the function remains enabled.
- The result of measuring values could be different from the actual values. If you get accurate values with CAD or Calculation etc., use those values without using this function instead.
Variation of Ver.
This function is available in manual mode.
| Ver. | Measuring object | Robot | ||||||
|---|---|---|---|---|---|---|---|---|
| Mass of payload | Payload center of gravity | Payload moment of inertia | HSR | HSA1 | VS-050 |
VS-068 |
VM-60B1 |
|
| 2.1.* | ◯ | - | ◯ | ◯ | - | - | - | - |
| 2.2.* | ◯ | - | ◯ | ◯ | ◯ | - | - | - |
| 2.3.* | ◯ | ◯ | ◯ | ◯ | ◯ | ◯ | - | - |
| 2.4.*~ | ◯ | ◯ | ◯ It is not supported by VM-60B1/6083. |
◯ | ◯ | ◯ | ◯ | ◯ |
Note: Sign ◯ shows able to use
- Once pressed Automatic measure in the window of Easy Setting, the window will change to the Automatic measure. (Ver.2.3.* or higher)
- This option is not available to VS-S2.
Outline of Motion When Measuring
Robot operates through the motion path in 1 to 3 ways according to measuring objects.
Ensure that there is no interference between the robot and equipment in the lower speed motion because the motions at lower and higher speed are performed at each operation path.
The external speed and the accelerations in the higher speed motion are shown in the table below.
When in the lower speed motion, the robot performs at 10% of speed and acceleration in its higher speed motion.
| Model name | Measurement item | ||
|---|---|---|---|
| Mass of payload | Payload center of gravity | Payload moment of inertia | |
| HSA1 | 30% | 50% | 30% |
| HSR | 30% | 70% | 30% |
| VS-050/060 | 1% | 1% | 50% |
| VS-068/087 | 1% | 1% | 70% |
| VM-60B1/6083 | 1% | 1% | - |
The speed of the robot may be more than 250 mm/s at the flange (mechanical interface) or the TCP point during the motions when measuring.
Maximum Travel Distance
Robot moves automatically when measuring.
The maximum travel distance from the start position is below.
(*) : After moving to the + direction, the robot returns to the start position.
HSR, HSA1 Series
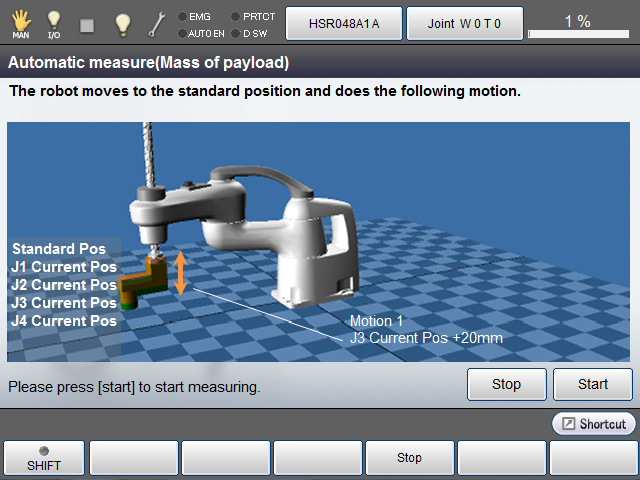
Mass of payload
| Motion axis | Motion 1 | Motion 2 | Motion 3 | |||
|---|---|---|---|---|---|---|
| Start point of motion | Travel distance | Start point of motion | Travel distance | Start point of motion | Travel distance | |
| J3 | Current Pos | 20mm | - | - | - | - |
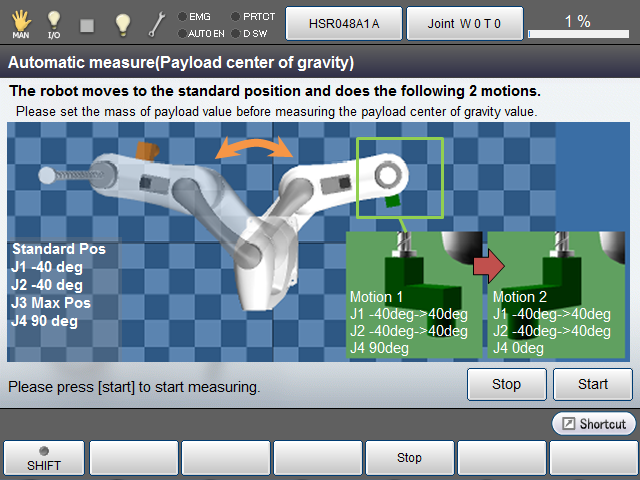
Payload center of gravity
| Motion axis | Motion 1 | Motion 2 | Motion 3 | |||
|---|---|---|---|---|---|---|
| Start point of motion | Travel distance | Start point of motion | Travel distance | Start point of motion | Travel distance | |
| J1 | -40° | 40° | -40° | 40° | - | - |
| J2 | -40° | 40° | -40° | 40° | - | - |
| J4 | 90° | - | 0° | - | - | - |
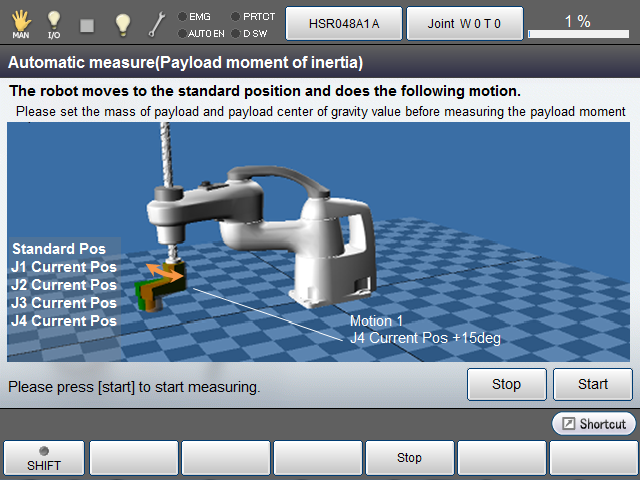
Payload moment of inertia
| Motion axis | Motion 1 | Motion 2 | Motion 3 | |||
|---|---|---|---|---|---|---|
| Start point of motion | Travel distance | Start point of motion | Travel distance | Start point of motion | Travel distance | |
| J4 | Current Pos | 15° | - | - | - | - |
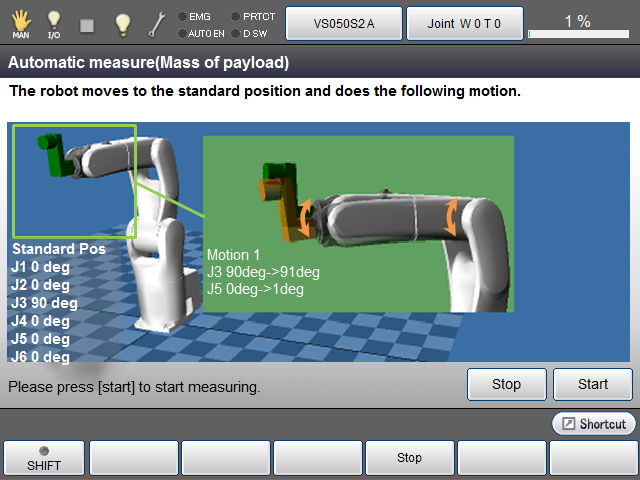
VS, VM Series
Mass of payload
| Motion axis | Motion 1 | Motion 2 | Motion 3 | |||
|---|---|---|---|---|---|---|
| Start point of motion | Travel distance | Start point of motion | Travel distance | Start point of motion | Travel distance | |
| J3 | 90° | 1° | - | - | - | - |
| J5 | 0° | 1° | - | - | - | - |
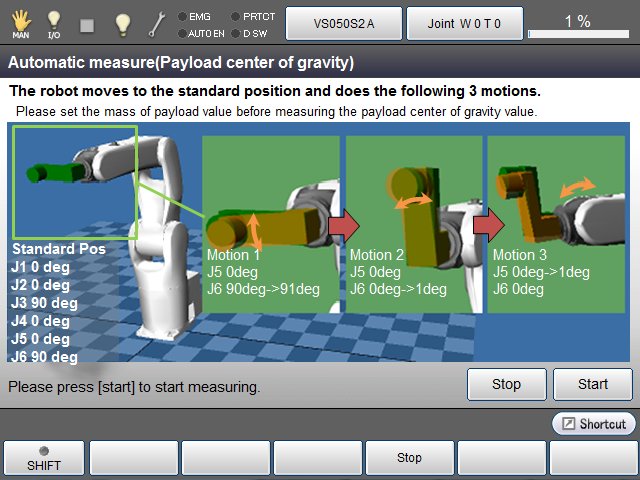
Payload center of gravity
| Motion axis | Motion 1 | Motion 2 | Motion 3 | |||
|---|---|---|---|---|---|---|
| Start point of motion | Travel distance | Start point of motion | Travel distance | Start point of motion | Travel distance | |
| J5 | 0° | - | 0° | - | 0° | 1° |
| J6 | 90° | 1° | 0° | 1° | 0° | - |
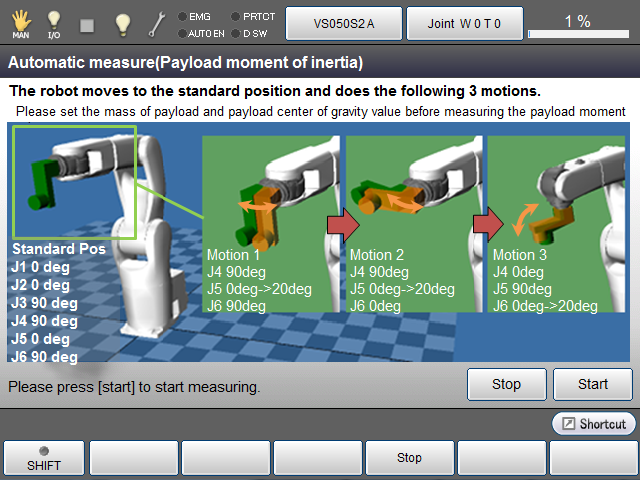
Payload moment of inertia (available only to the VS series robot)
| Motion axis | Motion 1 | Motion 2 | Motion 3 | |||
|---|---|---|---|---|---|---|
| Start point of motion | Travel distance | Start point of motion | Travel distance | Start point of motion | Travel distance | |
| J4 | 90° | - | 90° | - | 0° | - |
| J5 | 0° | 20° | 0° | 20° | 90° | - |
| J6 | 90° | - | 0° | - | 0° | 20° |
Operation Procedures
For each operation procedure of measurement, refer to the following sections.
- Auto Measuring Mass of Payload
- Auto Measuring Payload Center of Gravity
- Auto Measuring Payload Moment of Inertia
- When performing automatic measurement, be sure to execute measuring in the order of Mass of payload → Payload center of gravity → Payload moment of inertia. If performs in a different order, it may result in incorrect measurement values.
- If the calculated values of mass of payload, center of gravity and moment of inertia are sure, set these values. Automatic measurement is not needed.
ID : 2835