
ID : 4353
Steps in Writing Robot Programs
The following shows the WINCAPSIII work flow for writing a program and validating its operation.
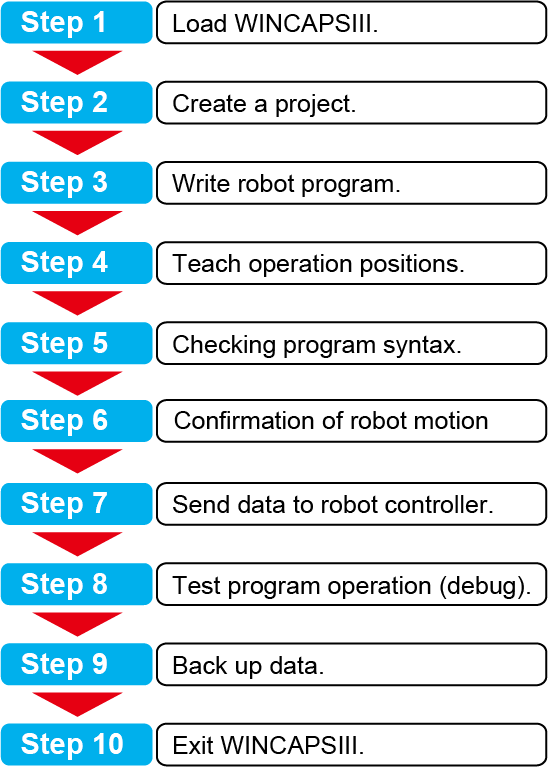
Step 1: Load WINCAPSIII.
Launch WINCAPSIII.
For further details, refer to Starting Up/Shutting Down.
Step 2: Create a Project.
This project contains all necessary data for the target robot.
For further details, refer to Creating a Project.
Step 3: Write Robot Program.
Write the robot operation program using the built-in editor.
For further details, refer to Writing Programs.
Step 4: Teach Operation Positions.
Specify operation positions by manipulating the virtual robot in the Arm 3D view window.
For further details, refer to Arm 3D View Window.
Using simple modeling and importing 3D data creates an on-screen simulation for specifying the robot's operation range and detecting collisions with surrounding equipment.
Step 5: Checking Program Syntax.
This step runs syntax check on the created program.
If errors are detected, the line number, and a brief note of the error appears on the output window.
For further details, refer to Syntax Check of the Program.
Step 6: Confirmation of robot motion
Check the motion of the program that you have created with the simulation function.
To modify the program, do STEP3-5 again. Adjust the program until the robot moves as you expected.
Step 7: Send Data to Robot Controller.
Connect to the robot controller and send it the data necessary for robot operation.
For further details, refer to Link with Robot Controller.
Step 8: Test Program Operation (debug).
Actually run the robot program and check the program flow,the robot operation range, and collisions with surrounding equipment.
If any problems are found, correct the program and repeat this operation until it works properly.
Step 9: Back Up Data.
Use WINCAPSIII to save the robot controller's internal data in projects.
For further details, refer to Data Transfer.
Step 10: Exit WINCAPSIII.
For further details, refer to Starting Up/Shutting Down.
ID : 4353