
ID : 4410
Data Transfer
Send and receive data between robot controller and WINCAPSIII.
Do not turn off the controller while data is being sent or received.
Some items will not appear in the list of transferable data due to WINCAPSIII settings or robot controller specifications.
Data Transfer Procedure
1
Choose Connect|Transfer data... to display Transfer data dialog box.
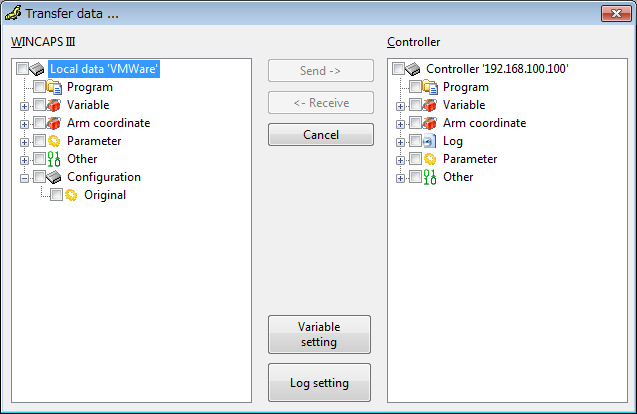
- Variable setting
Click Variable setting button to display the dialog.
Select a variable or arm coordinate system to be transferred or received from the dialog; [All], [Value], and [Usage and Macro].
In the default setting, [All] (transfer all data of variables and arm coordinate system) is selected. - Log setting
Select the log data area to obtain.
In the factory default setting, the error and operation logs are obtained from data storage memory, and other logs from working memory.To prevent the wrong operation, the setting above is effective one-time only.
This will be the default setting in the next transfer.
Perform the setting above every time when you transfer the data, if necessary.
2
Select the data source(s).
Selecting the WINCAPSIII check box sends data to the Controller. To receive data, select a check box on the controller side.
Selecting multiple sources is acceptable.
3
Click the Send or Receive button to display a confirmation dialog box.
4
Click the Yes button to start transferring data and display a progress screen.

Receiving data from the robot controller updates the WINCAPSIII project data.
If you made any changes in program, the changes will be discarded because the program will be updated.
Sending and Receiving Data that Includes CALSET Value
The arm parameters contain a CALSET value deciding the robot's particular position data. CALSET values are included when transferring arm parameters from the robot controller to WINCAPSIII, but not vice versa in order to prevent overwriting.
If you want to transfer arm parameter data including CALSET values to the robot controller, refer to the Robot Installation Protection Guide.
Preparation for Data Transfer
Configuring communication options for transfer of arm data from WINCAPSIII to the robot controller.
Choose Tool | Option | Communication tab. Select "Data send setting: CALSET data" and press OK.
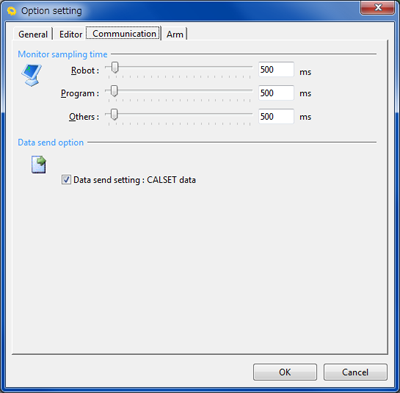
In normal operation, leave "Data send setting: CALSET data" unselected.
If this check box is selected, CALSET-related data in the robot controller will be overwritten when a new project is created or when arm parameters are transferred, causing errors in teaching positions.
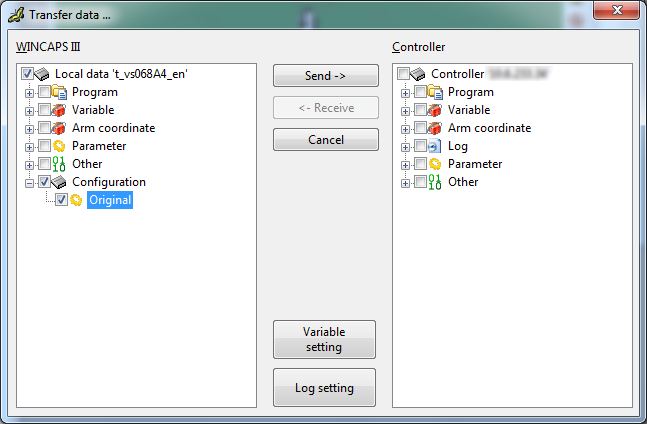
Data Transfer Procedure
Select Parameters | Arm parameters and Configuration | Original, then press Send.
ID : 4410