
ID : 7351
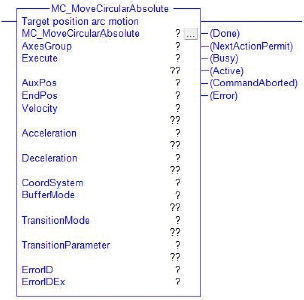
MC_MoveCircularAbsolute
To move the robot to the target position by arc interpolation control. Specify the route position and target position with a cartesian coordinate system (Position type).
| Graphic expression | AOI category |
|---|---|
 |
Motion |
Input and Output Variable
| Variable name | Data type | Valid range | Conditions for Input and Output |
|---|---|---|---|
| AxesGroup | eRC_AxesGroup | - | |
|
|||
| AuxPos | eRC_Position | For input | |
|
|||
| EndPos | eRC_Position | For input | |
|
|||
| CoordSystem | eRC_CoordSys |
|
For input |
|
|||
Input Variable
| Variable name | Data type | Valid range |
|---|---|---|
| Execute | Boolean |
|
|
||
| Velocity | Real | 0.1 to 100.0 |
|
||
| Acceleration | Real | 0.0001 to 100.0 |
|
||
| Deceleration | Real | 0.0001 to 100.0 |
|
||
| BufferMode | Integer | 0, 1, 6, 7, 8, 9 |
|
||
| TransitionMode | Integer | 0, 3, 10, 11 |
|
||
| TransitionParameter | Integer | 0 to 32767 |
|
||
Output Variable
| Variable name | Data type / Description |
|---|---|
| Done | Boolean |
|
|
| NextActionPermit | Boolean |
|
|
| Busy | Boolean |
|
|
| Active | Boolean |
|
|
| CommandAborted | Boolean |
|
|
| Error | Boolean |
|
|
| ErrorID | Integer |
|
|
| ErrorIDEx | DInt |
|
Function Description
- About Arc interpolation control
- Arc interpolation controls interpolation so that the path to reach the motion destination position will be an arc.
The figure below shows an example of motion by arc interpolation control.

Attention
To execute this AOI, AOI with the AOI category "Motion" needs to be made executable.
To make AOI with the AOI category "Motion" executable, use the AOI "MC_Power".
ID : 7351