
ID : 1002
Step Stop (All Tasks) (Input)
Function
Input this signal to step-stop the program being executed from the external device. All tasks will be step-stopped.
Input Conditions and Operation
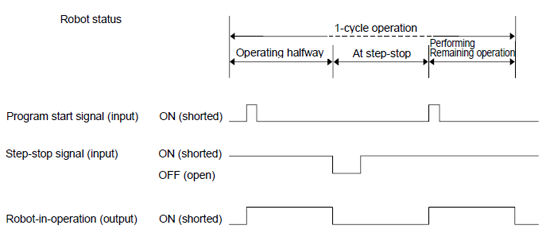
- If the state of this signal is changed from ON (shorted) to OFF (open), the robot will stop all tasks as soon as the ongoing step is completed, and the Robot-in-operation signal will be turned OFF. However, auto mode or external mode will remain valid, and the suspended program will be resumed by inputting a program operation command (start). See the figure given below.
- For resuming the program after a step stop, see"Program Operation Command (0001)".
|
|
ID : 1002