
ID : 1495
Electric Gripper Status
Use the command or the electric gripper screen to read the electric gripper status.
-1 : Light On
0 : Light Off
Emergency stop status (Hand[n].EmgState / SelectHand[m,n].EmgState )
This is the external emergency stop status.
- 1: The emergency stop condition is cleared. (Emergency stop input shorted.)
0 : An emergency stop condition has occurred.
Motor (Hand[n].Motor / SelectHand[m,n].Motor )
This is the motor power status.
-1 : Motor power ON
0 : Motor power OFF
Running (Hand[n].BusyState / SelectHand[m,n].BusyState )
This signal indicates that the electric gripper control board is operating.
-1 : Operating. Turns ON when an operating command is issued and the signal for that command is received.
0 : Ready to receive operating commands.
INPOS (Hand[n].InposState / SelectHand[m,n].InposState )
Refer to the “Error Message List” for error details.
This signal indicates that the electric gripper is at the target position.
-1 : Inside target position range after origin return and positioning.
0 : Outside target position range or currently moving.
The target position range is determined by the “Positioning completion distance” parameter.
| Operating Mode | Target Position |
|---|---|
Absolute position movement |
Specified absolute position |
Relative position movement |
Current position + movement amount |
Acceleration/deceleration absolute position movement/grip |
Movement amount + limit width |
Acceleration/deceleration relative position movement/grip |
Current position + movement amount + limit width |
Constant speed movement/grip (close) with ZON/Constant speed movement/grip (close) |
+ soft limit position (Note1) |
Constant speed movement/grip (open) with ZON/Constant speed movement/grip (open) |
- soft limit position (Note1) |
Note 1: When moving in origin return direction (open).
The soft limit is on the opposite side when moving in the origin return direction (close).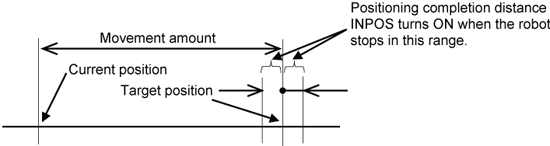
Hold (Hand[n].HoldState / SelectHand[m,n].HoldState )
This signal indicates that the fingers are gripping a workpiece.
-1 : The workpiece is gripped with the set gripping force.
0 : The electric gripper is not gripping.
The output turns OFF within ±1 pulse of the target position (see INPOS item above.)
Movement distance per pulse (resolution) Unit: μm
Model |
Distance |
Model |
Distance |
Model |
Distance |
SS-2005-3N |
31.4 |
SD-2005 |
1.6 |
ST-2004 |
31.4 |
SS-2005-5N |
18.9 |
SD-2810 |
1.7 |
ST-2013 |
32.1 |
SS-2010 |
17.5 |
SD-4220 |
1.9 |
ST-2820 |
16.1 |
SS-2815 |
10.6 |
FS,FT-2020 |
1.6 |
ST-4230 |
23.6 |
SS-4225 |
15.7 |
FS,FT-2840 |
1.3 |
|
|
Note: If the workpiece is gripped at an angle and the fingers then move, the HOLD signal turns OFF.
The HOLD signal may then remain OFF even if the workpiece is gripped properly.
Origin return completion (Hand[n].OrgState / SelectHand[m,n].OrgState )
This signal indicates that origin return is complete.
-1 : Origin return is complete.
0 : Origin return is not complete. (origin return incomplete)
Zone (Hand[n].ZonState / SelectHand[m,n].ZonState )
This signal indicates that the electric gripper is gripping inside the specified range.
Constant speed movement/grip with ZON (close/open)
-1 : The electric gripper is gripping between range specification 1 and range specification 2.
0 : The electric gripper is stopped outside the range specification.
Error (Hand[n].Error / SelectHand[m,n].Error )
This signal indicates that an error has occurred.
Other than 0 : When an alarm has occurred
0 : Normal status
Refer to the “Error Message List” for error details.
ID : 1495