
ID : 1998
Cooperative Control Function-related Setting On The Master Controller
Enter a license necessary for the cooperative control function, perform cooperative control function-related settings on the master controller, and then enter IP address of the slave controller. The license for the cooperative control function on the master controller is paid license.
For the way of obtaining a license, refer to "Optional Function and License".
Adding a License for Cooperative Control Function
Operation path:[F6:Setting]-[F8:Option]-[F1:Extension]
Add a license for cooperative control function to the controller.
To use the selective extended joint function, add a license for the selective extended joint function as well.
For details, refer to “Registering License” in OPTION.
Controller Settings
Operation path: [F6:Setting]-[F9:Cooperation]
To perform this operation, set the user level "Maintainer".
When you manipulate a teach pendant according to the above operation path, the following Cooperation setting window appears.
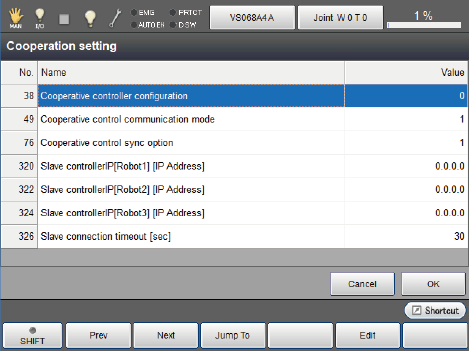
Configure the following settings on the Cooperation setting window.
| Cooperative Controller Configuration | Sets [Master controller 1]. | ||||
|---|---|---|---|---|---|
| Cooperative control communication mode | Selects a method of communicating between robot controllers. The setting values are as follows.
When the robot controller software version is 2.3.* or higher, 1: “Both Ethernet and EtherCAT (Defalt setting)" is set as a default. If you use Ethernet only, please change the value of the cooperative control communication mode to "0". |
||||
| Cooperative control sync option |
This function is used to clear the motion start timing gap when multiple robots run. refer to "SyncMove Option (Cooperative Control Function Option)". |
||||
| Slave Controller IP | Enters IP address of the slave controller. Once 0.0.0.0 is assigned to a slave-controller, slave-controllers written below will be invalid as well. |
||||
| Slave connection timeout | The master controller tries to establish communication with the slave controller at power-on. However, if communication is not established for a certain period of time, an error occurs. To prevent an error from occurring, synchronize the power-on for the master and slave controllers as much as possible. Increase this parameter value if an error still occurs. |
Once the settings have completed, reboot the controller.
Slave Controller Confirmation
Turn OFF the master controller. And then, turn ON the all robot controllers simultaneously.
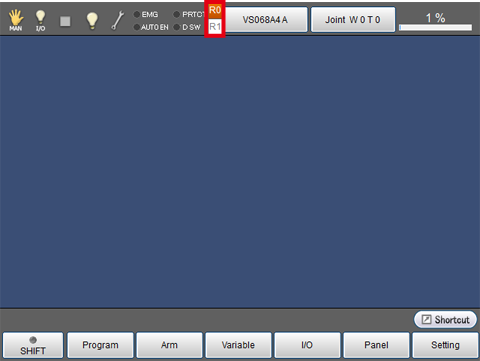
Check that the robot names for cooperative control function are properly displayed on the top of the screen.
The following is a sample window image when two robots are linked for cooperation.
ID : 1998