
ID : 2154
Operation Flow for Creating a Coordinate Operation-Dedicated Program
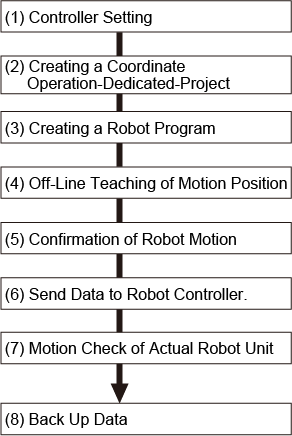
(1) Controller Setting
Setup the master and slave controllers by following the setup procedure of the cooperative control function guide.
(2) Creating a Coordinate Operation-Dedicated-Project
By using Cooperative Control Dual Arm Tool, receive data from the controller whose setup has done in STEP(1) to create a coordinate operation-dedicated project.
If you create a new project based on an existing project, match the number of IO devices and variables of the new project with that of the actual robot unit.
(3) Creating a Robot Program
Open a coordinate operation-dedicated project with WINCAPSIII. Create a motion program for the master robot.
(4) Off-Line Teaching of Motion Position
With arm operation and/or moving with variable, perform the teaching of the master robot motion position.
(5) Confirmation of Robot Motion
Check the motion of the program that you have created with the simulation function and debugging.
(6) Send Data to Robot Controller.
By using Cooperative Control Dual Arm Tool, send the entire coordinate operation-dedicated project to controllers.
Coordinate Robot Tool sends whole project at one time. If you intend to send specific data, such as variables or programs, use WINCAPSIII.
(7) Motion Check of Actual Robot Unit
With actual robot units, do the final check of the robot program you have created, such as performing precise teaching of motion positions and adjusting motion timings, etc.
(8) Back Up Data
With Cooperative Control Dual Arm Tool, make a backup of the coordinate operation-dedicated project by receiving data in the robot controller.
Coordinate Robot Tool receives whole project at one time. If you intend to receive specific data, such as variables or programs, use WINCAPSIII.
ID : 2154