
ID : 3406
System Configuration for Two Robots and One Conveyor
This system configuration is effective in the case where the conveyor moves so fast that one robot is not enough to pick up all workpieces. Use two robots for one conveyor.
This page describes the system configuration and the details in the following sections.
System Configuration Layout
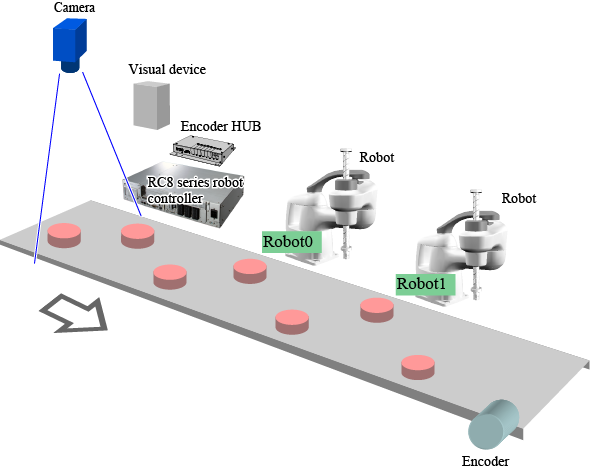
The above figure shows the configuration example of Vision Tracking system.
Wiring Diagram
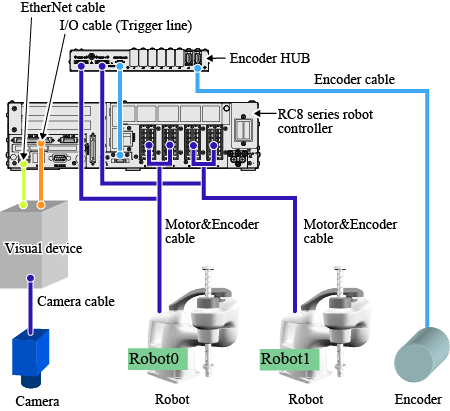
The above figure shows the configuration example of Vision Tracking system.
For information about the number of encoders available for an encoder hub and the joint number, refer to "Number of Available Encoders and the Joint Number".
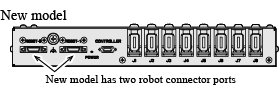
Encoder Hub
For encoder hub, there are old model and new model.
In the above wiring diagram, only new model is available. New model has two robot connector ports.
For details about the external diagram and the precaution on installation, refer to "Encoder HUB".
Attention
- When you examine and design this robot system, the knowledge of the dual arm control function is required. Please read "DUAL ARM CONTROL FUNCTION MANUAL" as well.
-
If both the dual arm control function and the conveyor tracking function are used together, only the following robot models are available. Extended joints are not available for this application.
- HSR
- HSA1
- Robots that are controlled by the MC8 series motion controller.
- When installing robots, pay attention that robots do not interrupt each other in operation.
- Use the extended-joint supporting RC8 series robot controller.
- You need to have one license of the conveyor tracking function. You do not need to prepare two licenses.
ID : 3406