
ID : 6986
Handling of Electric Gripper
Basic Movements
The electric gripper has two fingers.Two fingers are opened or closed to grip or release a workpiece.
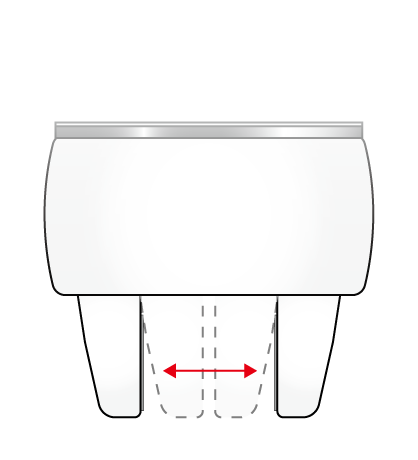
To suppress the load concentration on one finger, set a workpiece in such a way that the workpiece can be shifted in the motion direction of fingers.
| Fingers opened | Fingers closed |
|---|---|
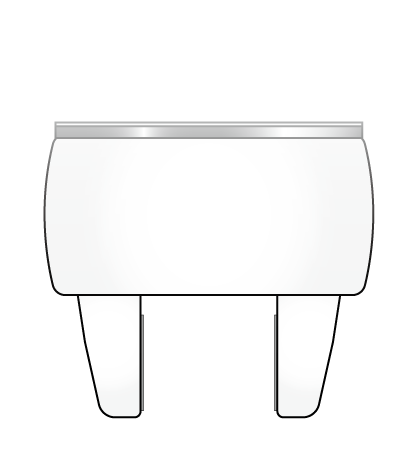 |
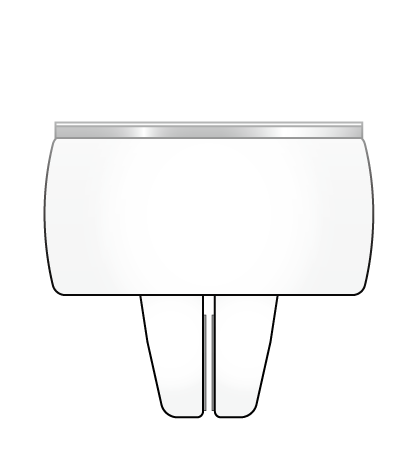 |
Workpiece Gripping
A workpiece is gripped in two different ways depending on its shape: (1) Gripped when the fingers are closed and (2) Gripped when the fingers are opened.
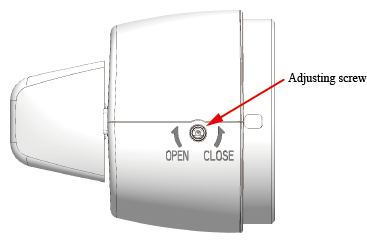
Even if the motor is turned OFF while a workpiece is gripped, the electric gripper can keep holding it because the fingers are locked in position by the self-locking mechanism. Nevertheless, when combined with vibrations and shock, the workpiece may still fall. Perform the risk assessment and then take appropriate protective measures to avoid dangerous condition caused by workpiece drop.
To move the fingers while the motor is OFF, manually turn the adjustment screw on the side of the electric gripper using a flat-blade screwdriver, etc.
Case |
Closing fingers to grip |
Opening fingers to grip |
|---|---|---|
| Workpiece shape | Gripping by the outer surface Example: Ordinary workpieces in general |
Gripping by the inner surface Example: Bottles and pipes |
Note that the electric gripper for COBOTTA cannot grip an object by opening fingers. To grip an object by opening fingers, you need to arrange for a gripper or fingers separately. For how to replace fingers, refer to Electric gripper for COBOTTA of product information.
Gripping Force Adjustment
When using the gripper, its gripping force may fluctuate according to the number of cycles used. If the gripping force increases or decreases over time (compared to its initial force), use the gripper power adjustment function to adjust the power of the gripping force.
This function can be used to collectively increase/decrease the gripper motor power instead of adjusting command arguments one by one. For details, refer to "Gripper Power Adjustment Function".
Gripping Speed Adjustment Function
This function can be used to collectively change the motion speed of gripping motions (manual operation, MoveH, MoveZH, MoveAH, MoveRH).
For details, refer to "Gripping Speed Adjustment Function".
Program-based Finger Operation
The two fingers move in bilateral symmetry. When the finger on your right (right finger) moves toward the right, the other finger (left finger) moves toward the left.
To have the hand move in accordance with the robot's movements, specify the finger movement in a program. Specify a distance between the fingers to specify a movement of the entire hand.
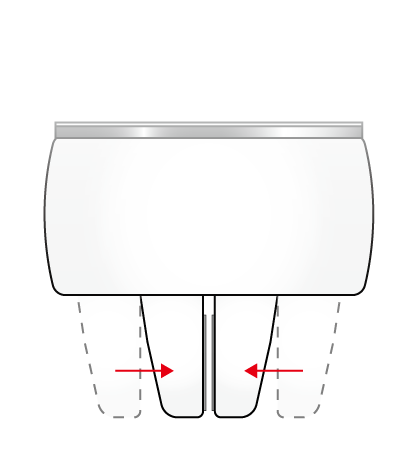
Specify a larger distance between the fingers to cause the hand to open. Specify a shorter distance between the fingers to cause the hand to close.
| Specifying a larger distance between the fingers | Specifying a shorter distance between the fingers |
|---|---|
Opening movement
|
Closing movement
|
Specification of Finger Positions
The positions of the fingers can be specified in two ways: Specifying absolute positions and specifying relative positions.
Absolute Position Specification
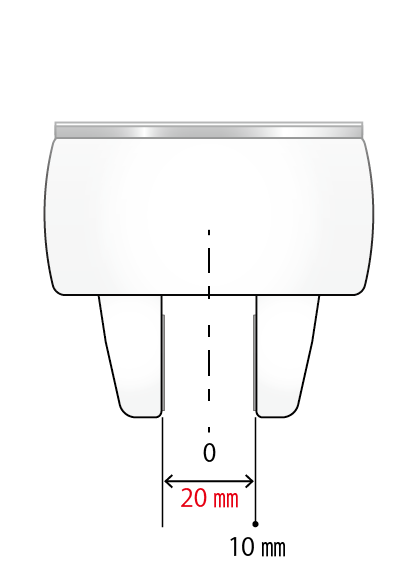
To specify an absolute position, specify a distance between the fingers.The fingers can move in a range of 0 mm to 30 mm specified as a distance between the fingers.The fingers come in contact with each other at 0 mm.
If the distance between the fingers is specified as 20 mm, for example, the right finger moves to the 10 mm position and the left finger moves to the 10 mm position in opposite directions.Seeing the entire hand, the fingers are 20 mm apart from each other.
| Specifying the distance between the fingers as 20 mm |
|---|
 |
Relative Position Specification
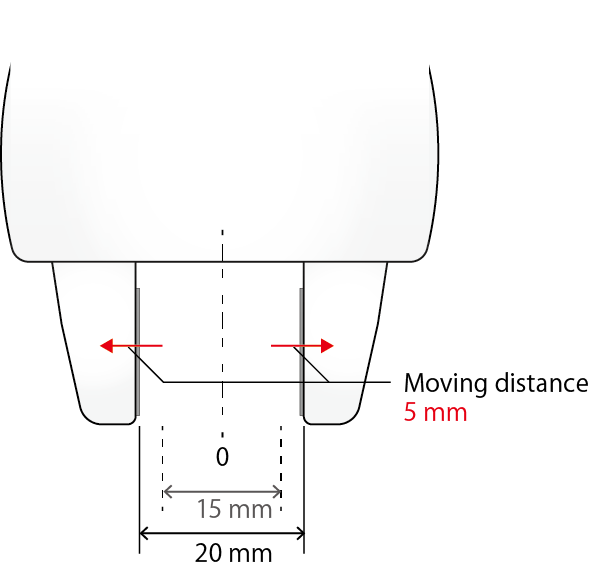
To specify a relative position, specify a moving distance of the fingers.If the moving distance is a positive value, the two fingers move by the moving distance so that they are farther away from each other.Seeing the entire hand, the fingers are opened.
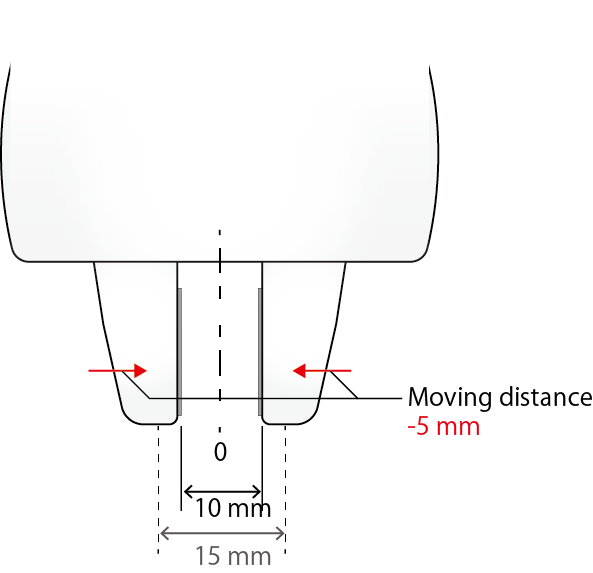
If the moving distance is a negative value, the two fingers move by the moving distance so that they are closer to each other. Seeing the entire hand, the fingers are closed.
While the fingers are 15 mm apart from each other, for example, relative movement by 5 mm sets the total distance between the fingers to 20 mm. Therefore, the right finger moves to the position of 10 mm and the left finger to the position of 10 mm in opposite directions.
Relative movement by -5 mm sets the total distance between the fingers to 10 mm. Therefore, the right finger moves to the position of 5 mm and the left finger to the position of 5 mm in opposite directions.
Relative movement by 5 mm |
Relative movement by -5 mm |
|---|---|
 |
 |
- The initialization of the finger positions may fail if the power is turned ON while the fingers are opened beyond the motion range of 30 mm.
Turn the screw on the side of the electric gripper to set the distance between the fingers to 30 mm or less before the power is turned ON. - If the finger position of the gripper moves outside of the motion range while you manually turn the screw on the side of the electric gripper to adjust the gripper, make sure to adjust the finger position so that it stays within the motion range. If the finger position is outside of the motion range, the gripper may not operate properly.
Point Data
A program can be written in two ways: (1) Using commands to specify directly the finger movements and positions and moving distances and (2) Using a data format called point data to have COBOTTA memorize the movements and positions and moving distances in advance and using commands to call the point data.
Point data is useful because, while teaching positions to the robot, the user can manually open and close the gripper to have it memorize the results.
| Type | Command |
|---|---|
| Using preset point data | |
| Using commands to directly specify the finger movements and positions and moving distances | HandMoveA |
ID : 6986