
ID : 7149
Preparation for Use
Attach the electric gripper to the arm and set the hand parameters before using it.The [57: Hand Type] setting is required. Set other hand parameters if required.
Set the hand parameters using Remote TP or Virtual TP.
For details on how to use Remote TP and Virtual TP, refer to "TP App Operation Guide."
Procedure
1
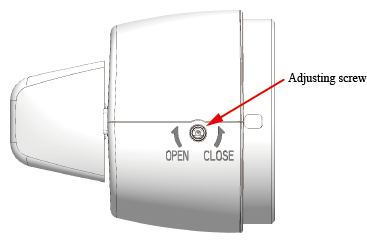
If the fingers of electric gripper are open wider than 30 mm while the motor is OFF, turn the adjustment screw on the side of the electric gripper to “CLOSE” by using a flat-blade screwdriver, etc. and close the fingers.
2
Use the following operation path to open the hand parameter setting screen.
Operation path: Top window - [F9 Hand] - [F6 Aux]
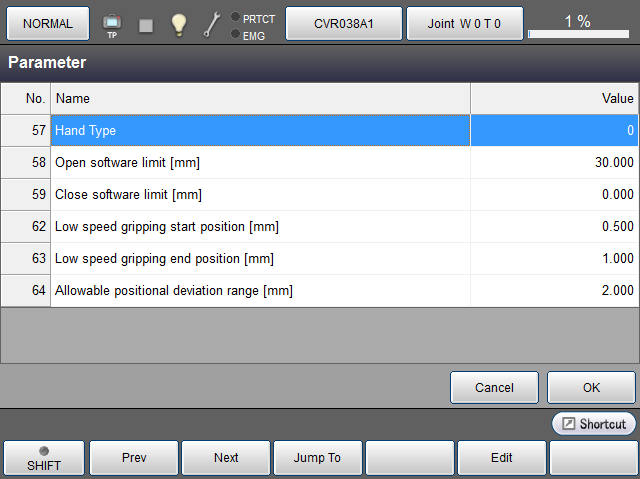
3
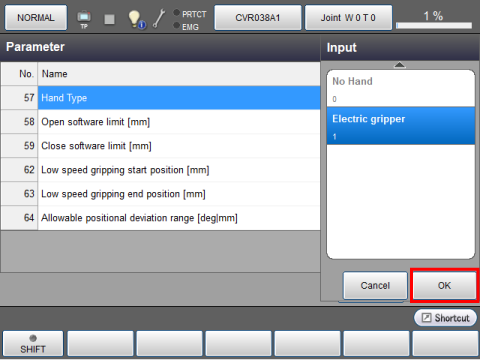
Select [57: Hand Type] and press [F5 Edit] button.
When the input window opens, select [Electric gripper] and press the [OK] button.
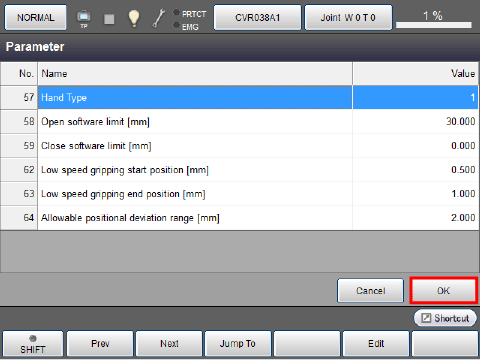
4
In the Parameter screen, press the [OK] button.
5
When the parameters are successfully changed, a system message appears. Press the [OK] button to clear the message.
Turn OFF the power of COBOTTA and turn it ON again.
The parameter settings take effect only after the power is turned OFF and ON again.
6
Other hand parameters are listed below.
To change the initial values, perform Steps 2 through 4.Other parameters take effect immediately after setting. There is no need to restart the power.
| Parameter type | Description |
|---|---|
| Hand type | 0: No Hand/1: Electric gripper |
| Opening direction software motion limit [mm] (*1) |
Sets the motion limit in finger opening direction. Range: 0 - 30 Initial value: 30 |
| Closing direction software motion limit [mm] (*1) |
Sets the motion limit in finger closing direction. Range: 0 - 30 Initial value: 0 |
| Low speed gripping start position [mm] (*2) | Specifies the low speed gripping start position when specifying [Accelerated/Decelerated Absolute Movement and Grip Mode] and [Accelerated/Decelerated Relative Movement and Grip Mode] using HandChuck command and when executing HandMoveAH and HandMoveRH commands. |
| Low speed gripping end position [mm] (*2) | Specifies the low speed gripping end position when specifying [Accelerated/Decelerated Absolute Movement and Grip Mode] and [Accelerated/Decelerated Relative Movement and Grip Mode] using HandChuck command and when executing HandMoveAH and HandMoveRH commands. |
| Allowable positional deviation range [mm] (*2) | Specifies the allowable positional deviation range when specifying the [Absolute position movement] and [Relative position movement] modes using HandUnChuck command and when executing HandMoveA and HandMoveR commands. |
(*1) An error occurs if the opening direction software motion limit value is smaller than the closing direction software motion limit value.
(*2) Refer to "Operating Mode."
ID : 7149