
ID : 7161
Operating Mode
There are special operating modes each for the gripping motion (Chuck) and the releasing motion (Unchuck).
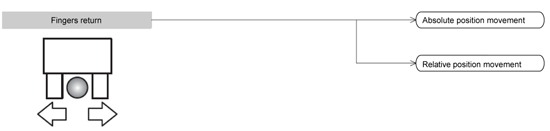
For Unchuck, simply specify the positions of the fingers as an absolute position or a moving distance from the current position to move the fingers to these positions.The fingers stop when they reach the specified positions.
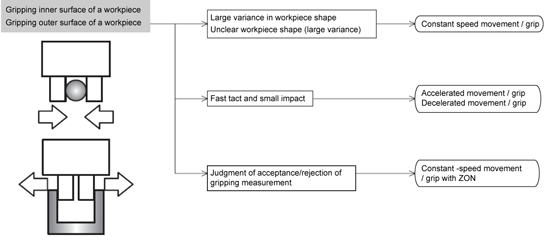
Chuck moves the fingers in a direction to grip a workpiece.A constant force continues to be applied in a direction of the workpiece so that the fingers coming in contact with the workpiece stop and remain at this position.This is the workpiece gripping state.The force that continues to be applied in a direction of the workpiece is the gripping force.
The gripping force must be adjusted to an appropriate value.Too large a gripping force will damage the workpiece. In contrast, too small a gripping force will cause the workpiece to drop during operation.
For Chuck, there is also a mode in which the fingers can be moved fast at first and slower near the workpiece. Another mode has a function of evaluating whether the gripping of the workpiece can be detected within a certain range.
ID : 7161