
ID : 7163
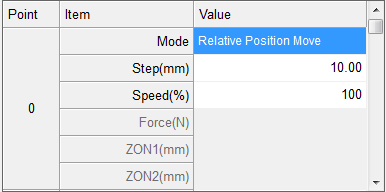
Relative Movement Mode
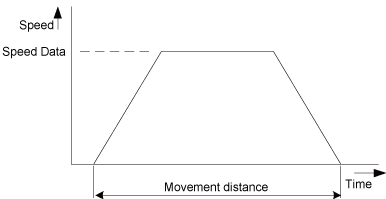
In Relative Movement mode, the fingers move from the current position for a specified moving distance.
The Inpos state starts when the movement for a specified moving distance is completed.
The following values can be specified:
| Moving distance (mm) |
The setting range is from -999.9 mm to 999.9 mm. |
|---|---|
| Speed (%) | The setting range is from 1 to 100. |
If a workpiece is gripped by the absolute position move or the relative position move, overcurrent error, excessive position error, or motor overload error may occur. To grip a workpiece, use a command for gripping motion. Use the absolute position move and/or the relative position move only for releasing a workpiece or moving robot fingers.
ID : 7163