
ID : 7166
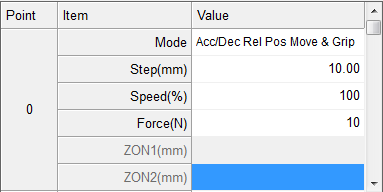
Accelerated/Decelerated Relative Movement and Grip Mode
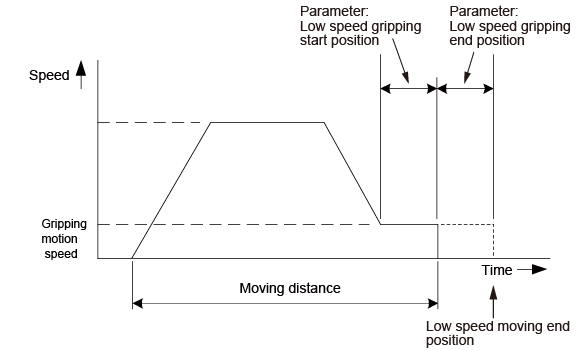
In the Accelerated/Decelerated Relative Movement and Grip mode, the fingers move under trapezoidal speed control until they just reach a specified moving distance from the current position and then at a constant speed (gripping motion speed) until they grip the workpiece. The workpiece is gripped with a specified gripping force.
To change the gripping motion speed, set the value in the gripping speed adjustment function. For details, refer to "Gripping Speed Adjustment Function".
Specify where the grip mode should start before reaching the specified position in the parameter "62:Low speed gripping start position" in advance. For details, refer to "Preparation for Use."
If the fingers grip the workpiece during the gripping motion, they enter the Hold state.
If the fingers achieve the total distance required to reach the specified position and low speed gripping end position, they enter the Inpos state.
Specify the low speed gripping end position in the parameter "63:Low speed gripping end position" in advance. For details, refer to "Preparation for Use."
The following values can be specified in this mode:
| Moving distance (mm) | Specify the moving distance from the current position to the workpiece. The setting range is from -999.9 mm to 999.9 mm. |
|---|---|
| Speed (%) | The setting range is from 1 to 100. |
| Force (N) | The setting range is from 6 to 20. |
ID : 7166