
ID : 7272
Direct Teaching
A direct teaching is a teaching method by moving a COBOTTA arm with user's hands to acquire the position and attitude information of COBOTTA.
The following shows the direct teaching procedures.
- Open the variable teaching window
- Change the operation mode to the Direct mode.
- Teach the position and attitude of the robot.
- Release the Direct mode
1. Open the variable teaching window
The following shows the direct teaching procedures.
1
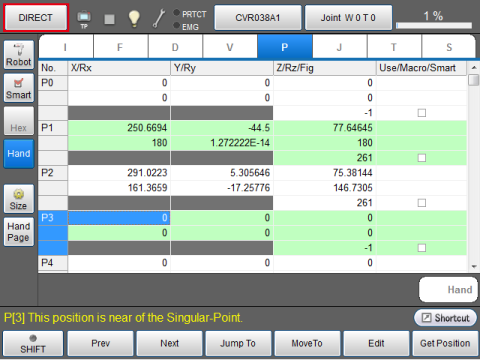
With a Remote TP or Virtual TP, open a variable window from the following operation path.
Operation path : Top window - [F3 Variable]
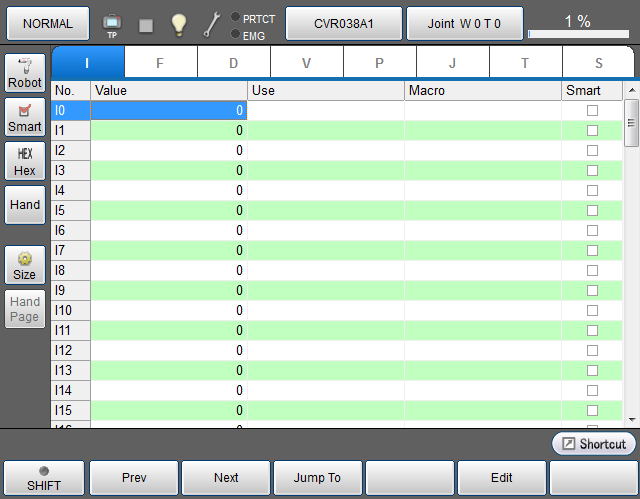
2
From the variable type tabs, select a variable type to be use for the robot position teaching, and then select a variable number.
For position teaching, P-, J- and T-type variables are available.
To select a variable, click a data area cell of desired variable number. A selected cell turns blue.
For details about how to operate, refer to "Displaying and Changing Variable Screen" of TP App Operation Guide.
2. Change the operation mode to the Direct mode.
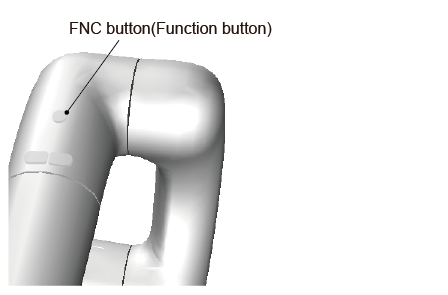
As the following figure shows, changing the operation mode to the Direct preparation mode with the window operation and then pressing-down the function button on the arm for 1.5 second or longer will change the operation mode to the Direct mode.
3
On the Remote TP/Virtual TP, click a button which displays [NORMAL].
The caption of this button changes according to the selected operation mode.
| Caption | Mode | Description |
|---|---|---|
| NORMAL | Normal mode |
Users can operate a COBOTTA manually, also can start it from a program. When holding down the function button on the arm for 1.5 seconds or longer in this mode, the brake will be released. Then the arm can be moved by pushing with a hand. Holding down the button again for 1.5 seconds or longer will lock the brake. |
| DIRECT | Direct preparation mode | Forbids the robot operation from TP App and I/O, etc Under this operation mode, users can't move the COBOTTA arm with their hand. |
| Direct mode | Users can move a COBOTTA arm with their hand. Under this mode, if the function button on the arm is long-pressed for 1.5 second or longer, the operation mode will be back to the Direct preparation mode. |
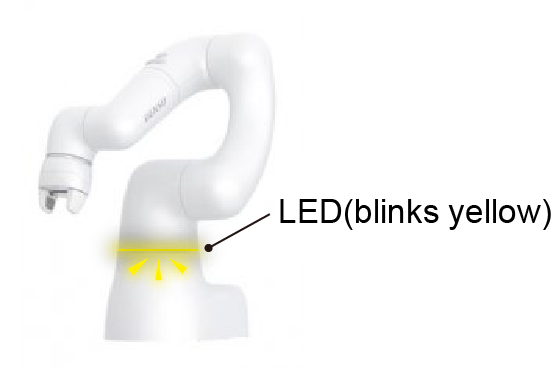
- If an error other than a safety-related error is generated (LED lights in yellow) during release/lock brake switching or Direct mode/Direct preparation mode switching with the function button, the error is reset first, and then the status changes.
- Release the function button within 10 seconds. Pressing the button for 10 seconds or longer will generate a button adhesion error.
- Statuses cannot be switched while a safety-related error (LED lights in red) is generated.
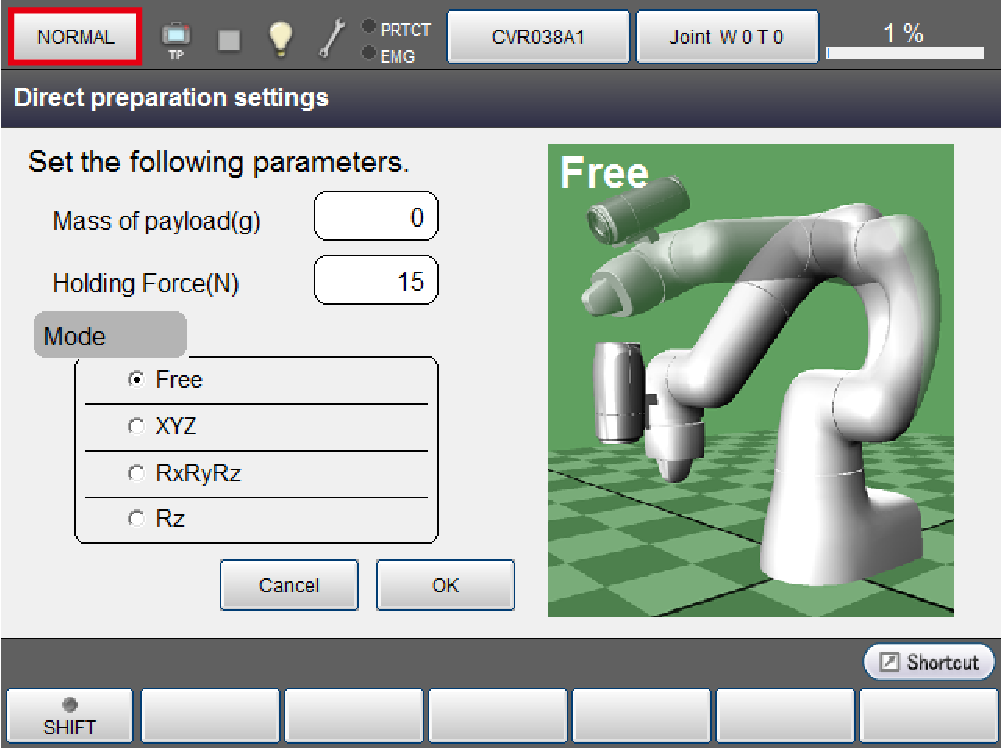
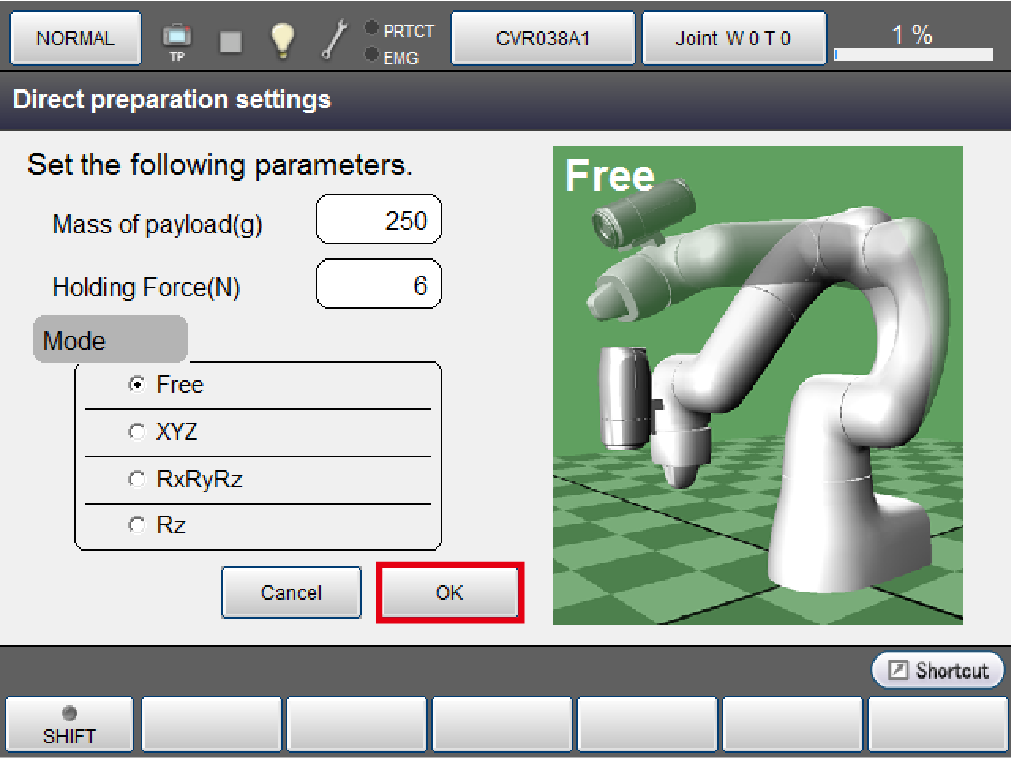
4
Direct preparation settings window appears. Change parameters according to your needs. And then click [OK].
The details of each item are shown in the following table.
The value of mass of payload is retained until COBOTTA is turned off.
The value of gripping force is retained after the restart. too.
Assist mode is retained until it is switched to the Normal mode.
| Item | Initial value | Content |
|---|---|---|
| Mass of payload (g) | 0 | Specifies the mass of payload of a workpiece. |
| Holding Force (N) | 15 | Specifies the gripping force of an electric gripper. |
| Mode | Free | Assists the adjustment of teaching by retaining the position and posture. Fress: The position and posture can be changed freely. |
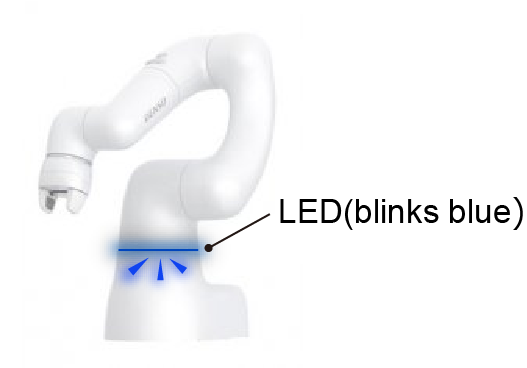
The button will be changed to [DIRECT] and the LED of COBOTTA will change to slow flashing in blue. Now, switching to direct preparation mode has been completed.
5
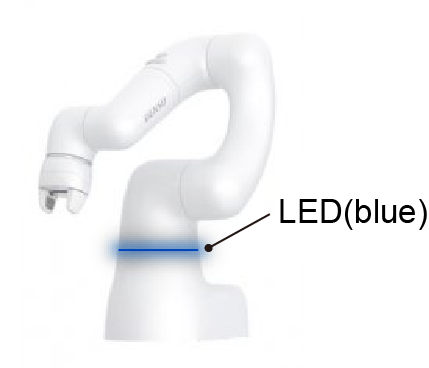
Once the caption shows [DIRECT], press and hold down the function button on the arm for 1.5 second or longer.
Once LED on the COBOTTA turns blue, the operation mode has been changed to the Direct mode successfully.
When a recovery possible error occurs, the error will be reset automatically by holding down the function button for 1.5 seconds or longer. Once the error is reset, the mode switches to Direct mode.
However, if the COBOTTA LED is lit in red, the error cannot be reset with the above procedure. In such a case, use TP App, I/O, or PacScript commands to reset the error and perform motion preparation first, and then switch to Direct mode.
In version 2.7.* or older, when a recovery possible error occurs, holding down the function button for 1.5 seconds or longer will reset the error, but the mode will not switch to Direct mode. Hold down the function button again for 1.5 seconds or longer, and the mode will switch to Direct mode.
3. Teach the position and attitude of the robot
The following explains how to teach the robot position and attitude. If you perform the gripper's teaching together, refer to "Interlock between Robot Position Teaching and Point Data Teaching" of electric gripper.
6
Move the COBOTTA arm with your hands.
When the COBOTTA arm approaches the software limit, the COBOTTA's LED turns yellow and starts blinking at the slow speed. Once the arm exceeds the software limit, the LED starts blinking at the high speed.
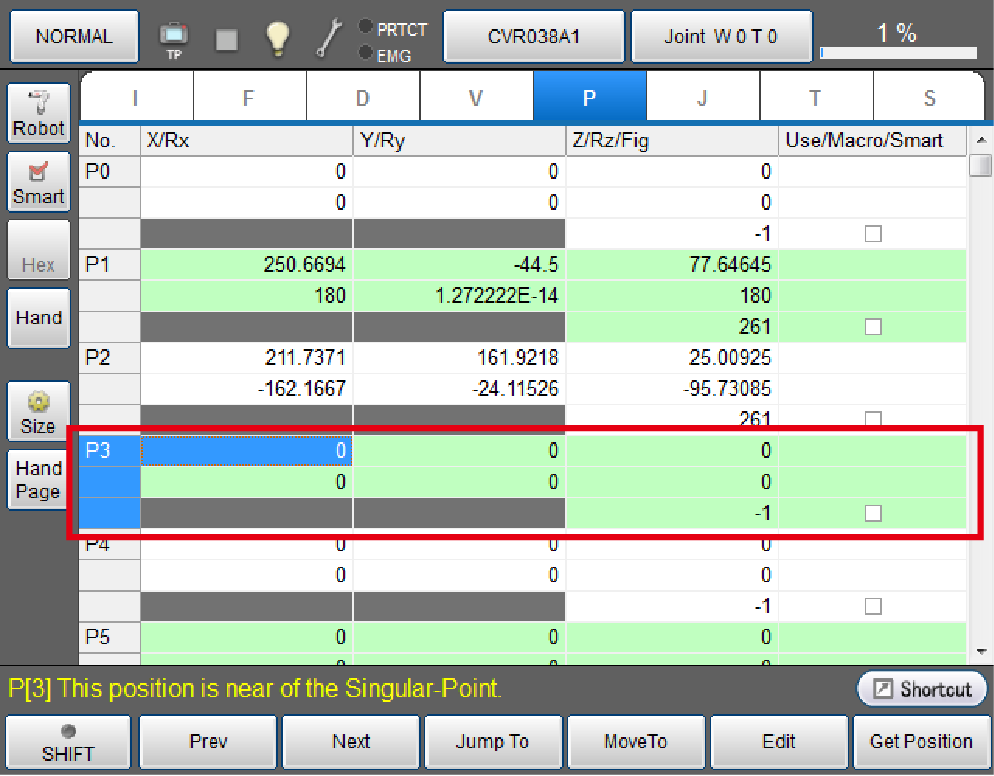
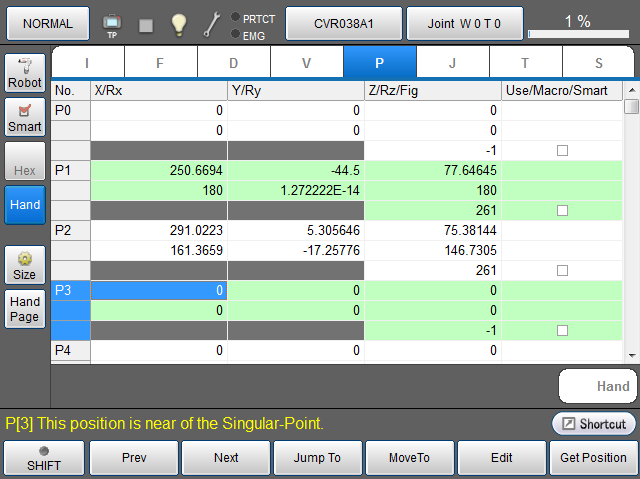
Also, when COBOTTA arm approaches the singular point, the LED turns yellow and starts blinking at the slow speed.
7
When the COBOTTA poses the teaching position and attitude, press the function button on the COBOTTA arm, or click [Get Positon] on the Variable window.
The position information of the robot is loaded into the variable data.
8
Repeat the STEP6 to STEP7 until all the necessary positions/attitudes are taught.
The number of variable that stores the position information is automatically counted up whenever you press the function button on the COBOTTA. However, once it reaches the upper limit set for variables, it will no longer count up. Be careful not to overwrite the data.
If you use [GetPosition] button on the Variable window, the number of variable is not counted up automatically. In this case, you need to select a variable number where you want to load the position information first, and then click [GetPosition] on the window.
This step completes once you finish teaching of all the necessary positions and attitude.
4. Release the Direct mode
You cannot manipulate the robot arm manually nor program execution under both the Direct mode and Direct preparation mode.
To release the Direct mode or Direct preparation mode, click [DIRECT] on the window.
When returning to the normal mode, the operator should step back from COBOTTA and keep sufficient distance to secure safety. The robot may start to move unexpectedly due to a program start from the supervisory task, PLC, etc.
The operation mode becomes Normal mode once the Direct mode or Direct preparation mode is released. On the Remote TP/Virtual TP, the caption of the button will be [NORMAL]. The color of LED on the arm changes according to the operation state at the moment except for blue.
ID : 7272
- Related Information
- Assist Direct Function