
ID : 7252
Displaying COBOTTA Setting Menu
Operation path: [F6 Setting] - [F10 COBOTTA]
This window shows COBOTTA setting menu.
This function is available in Ver.2.7.* or higher.
Press [F10 COBOTTA] to display the following [COBOTTA] window.
[F3 MAC address] function has been abandoned since version 2.7.1.
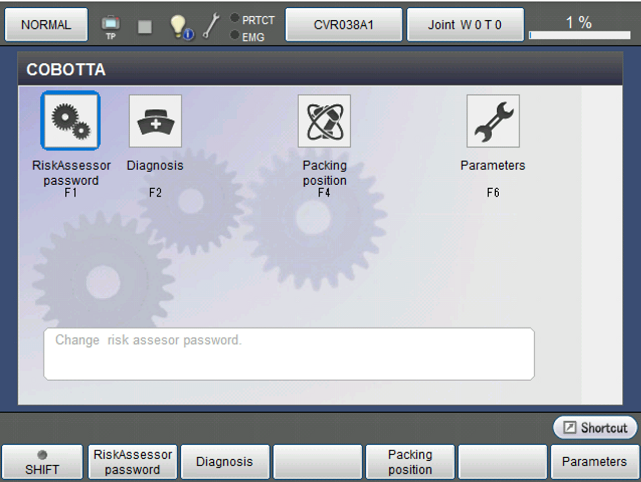
| Available function keys | |
|---|---|
| [F1 RiskAssessor password] | Changes the password for the risk assessor. The initial value of the risk assessor password is the following character string.
|
| [F2 Diagnosis] | Sets the diagnosis motion of COBOTTA. |
| [F4 Packing position] | Moves the robot to the packing position. Pressing [F4 Packing position] will prepare to move the robot to the packing position. Set the packing posture depending on the packing material used. The packing posture can be set through [F6 Parameters] or "VRC Setting". In packing posture movement, unintended motion may occur. Do not enter the motion range of the robot. |
| [F6 Parameters] | Packing posture of COBOTTA is selectable. Set the packing position depending on the packing material in the package box. [Pose1] fits with the packing material used for shipment up to February 2019. [Pose2] fits with the packing material used for the current shipment. When the user level is programmer, only viewing is possible. When the user level is maintainer, editing is also possible. For the packing material, refer to "Packing Method for Package Box". |
ID : 7252