
ID : 186
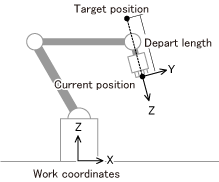
Depart
Function
To move from the current position in direction toward the tool's -Z coordinate.
Syntax
Depart motion interpolation, depart length[, motion option]
Guaranteed entry
- Motion interpolation
- Designate a motion interpolation method: "P"/"PTP" for PTP interpolation motion, or "L" for CP interpolation motion.
- Depart length
- Designate an depart length by single precision real number type data. Target position option can be added to the depart length.
- Motion option
- A motion option can be specified.
Description
The system moves from the current position in direction toward the tool's -Z coordinate.
To execute this statement, the task must acquire robot axis control.
Calculation of target position
A target position can be obtained as follows:
TargetPos = DevH(DestPos, P(0, 0, -Length))'Example of activating the motion after checking that the target position is within the motion space
If OutRange(DevH(DestPos, P(0, 0, -Length))) = 0 Then
Depart P, Length
End IfRelated Terms
Attention
-
Example
'!TITLE "Relative Motion by Tool Coordinate Designation"
' Move in direction toward -Z by the value specified by the tool coordinates
Sub Sample_Depart
Dim aaa As Single
Dim bbb As Single
TakeArm Keep = 1
' Move to a position 70 mm away from the current position
Depart P, 70
aaa = 20
bbb = 40
' Move to a position aaa (20 mm) away from the current position
Depart L, aaa, Speed = 90
' Move to a position bbb (40 mm) away from the current position
Depart L, bbb, S = 80
End SubID : 186