
ID : 1133
Preparation of Hardware when Using ATI Industrial Automation Force Sensor
This page describes details of the devices required to use a force sensor manufactured by ATI Industrial Automation for the force sensor–based force control function.
- This manufacturer’s force sensors are available when the robot controller software version is Ver.2.11.0 or higher.
- If the cooperative control function is used, this manufacturer’s force sensors cannot be used.
Available Force Sensors
Among ATI Industrial Automation force sensors, the following models are available.
Model |
Rated load |
|||
|---|---|---|---|---|
Fx、Fy [N] |
Fz [N] |
Tx、Ty [Nm] |
||
Axia80-M8 |
(*1) |
±150 |
±470 |
±8 |
Axia80-M20 |
±500 |
±900 |
±20 |
|
Axia80-M50 |
±1200 |
±2000 |
±50 |
|
Nano17 Titanium |
(*2) |
±32 |
±56.4 |
±200 |
Nano17 |
±50 |
±70 |
±500 |
|
Nano17 IP65/IP68 |
||||
Nano25 |
±250 |
±1000 |
±6 |
|
Nano25 IP65/IP68 |
||||
Nano43 |
±36 |
±36 |
±500 |
|
Mini27 Titanium |
±80 |
±160 |
±4 |
|
Mini40 |
±240 |
|||
Mini40 IP65/IP68 |
||||
Mini45 Titanium |
±240 |
±480 |
±12 |
|
Mini45 |
±580 |
±1160 |
±20 |
|
Mini45 IP65/IP68 |
||||
Mini58 |
±2800 |
±6800 |
±120 |
|
Mini58 IP60 |
||||
Mini58 IP65/IP68 |
||||
Mini85 |
±1900 |
±3800 |
±80 |
|
Gamma |
±130 |
±400 |
±10 |
|
Gamma IP60 |
||||
Gamma IP65 |
||||
Gamma IP68 |
||||
Delta |
±660 |
±1980 |
±60 |
|
Delta IP60 |
||||
Delta IP65 |
||||
Delta IP68 |
||||
Theta |
±2500 |
±6250 |
±400 |
|
Theta IP60 |
||||
Theta IP65/IP68 |
||||
Omega85 |
±1900 |
±3800 |
±80 |
|
Omega85 IP65/IP68 |
||||
Omega160 |
±2500 |
±6250 |
±400 |
|
Omega160 IP60 |
||||
Omega160 IP65/IP68 |
||||
Omega191 |
±7200 |
±18000 |
±1400 |
|
Omega191 IP60 |
||||
Omega191 IP65/IP68 |
||||
Omega250 IP60 |
±16000 |
±32000 |
±2000 |
|
Omega250 IP65/IP68 |
||||
Omega331 |
±40 |
±88 |
±6 |
|
|
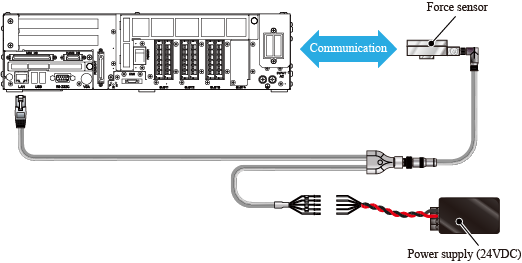
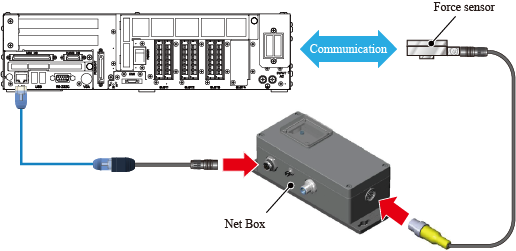
*1, *2 : For the connecting method of a robot controller and a force sensor, there are the following two types. One is to use the communication interface "Net Box", the other is not to use it. Force sensor models indicated (*1) in the above table do not use Net Box (hereafter, these sensor models are called "Direct-connection type force sensor"). Force sensor models indicated (*2) in the above table use Net Box (hereafter, these sensor models are called "Net Box-connection type force sensor").
|
||||
Information of each force sensor indicated above is a part of all information. For information other than above such as outer dimensions and environmental conditions, refer to the instruction manual accompanied with the force sensor or the instruction manual published on ATI Industrial Automation website.
In the instruction manual of ATI Industrial Automation, the force sensor is described as "Transducer".
Preparation of Hardware
Hardware to be prepared is different between Direct-connection type force sensor and Net Box-connection type force sensor.
For details, refer to the following link.
| Force sensor |
System configuration (Link destination) |
|---|---|
| Direct-connection type force sensor | Preparation of Hardware when Using Direct-connection Type Force Sensor |
| Net Box-connection type force sensor |
Preparation of Hardware when Using Net Box-connection Type Force Sensor |
ID : 1133