
ID : 2896
Deleting Tracking Buffer Data
This section describes the following items.
- The Tracking Buffer Deletion Process by TrackTargetPos
- The Deletion Process for Data of a Workpiece Beyond the Lower End Limit
The Tracking Buffer Deletion Process by TrackTargetPos
Data deleted from tracking buffer will differ depending on the argument specified in TrackTargetPos command.
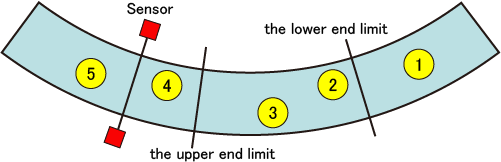
In the image below, there are five workpieces on the sensor tracing turntable. Workpieces are conveyed from the upstream to the downstream, in the order from the Work 1 to Work 5. Once a workpiece passes through the sensor, data of the workpiece will be recorded in the tracking buffer.
Before Executing TrackTargetPos
Data of the Work 1 to Work 4 are stored in the tracking buffer.
Data on the tracking buffer can be checked by TrackBufferIndexes command.
vIndex = TrackBufferIndexes(1, -1)
Value of vIndex : (1, 2, 3, 4)
After Executing TrackTargetPos(1)
Following workpiece data will be deleted.
- Workpiece data obtained by TrackTargetPos (In this example, work 2)
TrackTargetPos(1)
vIndex = TrackBufferIndexes(1, -1)
Value of vIndex : (1, 3, 4)
When Tracking Buffer is Retained by TrackTargetPos(1.-1,-1,1)
Data obtained by TrackTargetPos command is retained in the tracking buffer.
To delete data obtained by TrackTargetPos command, use TrackTargetRelease command.
Case1
TrackTargetPos(1, -1, -1, 1)
vIndex = TrackBufferIndexes(1, -1)
Value of vIndex : (1, 2, 3, 4)
Case2 : Obtaining index Number of the Target Data of TrackTargetPos
TrackTargetPos(1, -1, -1, 1)
vIndex = TrackBufferIndexes(1, 1)
Value of vIndex : (2)
The Process in Lower Than Ver.2.16.*
For a robot controller with the software version lower than 2.16.*, execution of TrackTargetPos implements the process below in addition to what is mentioned above.
- Delete data of a workpiece beyond the lower end limit for the most downstream robot
For example, for a robot controller with the software version lower than 2.16.*, executing "TrackTargetPos(1)" mentioned above results in the process below.
TrackTargetPos(1)
vIndex = TrackBufferIndexes(1, -1)
Value of vIndex:(3, 4)
The Deletion Process for Data of a Workpiece Beyond the Lower End Limit
Executing the following commands deletes data of a workpiece beyond the lower end limit for the most downstream robot.
- TrackSetSensor
- TrackSetVision
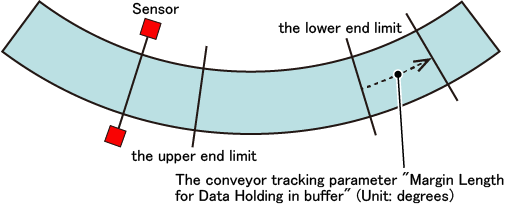
More precisely, even if a workpiece goes beyond the lower end limit, the workpiece data is not deleted until it goes beyond a certain range. The range is determined by "Margin Length for Data Holding in buffer", one of conveyor tracking parameters. The range is measured in "degrees" with the initial value 0 degrees.
"Margin Length for Data Holding in buffer" can be set for each conveyor with the available numbers from "Margin Length for Data Holding in buffer(Coveyor#1)" to "Margin Length for Data Holding in buffer(Coveyor#16)" (their parameter numbers ranging from 965 to 980). Set a parameter with the number corresponding to the conveyor to be used.
-
With the following two conditions satisfied, a large amount of workpiece data beyond the lower end limit for the most downstream robot accumulates in the tracking buffer. This can result in slower processing of tracking commands.
- The parameter "Margin Length for Data Holding in buffer” is set high.
- Many workpieces go beyond the lower end limit for the most downstream robot.
- "Margin Length for Data Holding in buffer", one of conveyor tracking parameters, is available to a robot controller with the software version 2.16.* or higher. In a robot controller with the software version lower than 2.16.*, it results in the same process as when the conveyor tracking parameter "Margin Length for Data Holding in buffer" is set to 0.
- For a robot controller with the software version lower than 2.16.*, executing TrackTargetPos also deletes data of a workpiece beyond the lower end limit for the most downstream robot.
ID : 2896